Пошаговые инструкции и схемы по созданию роботов своими руками:
В данном разделе сайта вы найдете подробные инструкции по сборке роботов своими руками в мастерской или даже у себя дома. Увидите фото и видеоинструкции,помогающие в домашних условиях собственноручно создать различные модели роботов. Прилагаются простые и понятные обывателю схемы и чертежи, для того чтобы самостоятельно осваивать это увлекательное и полезное занятие. Благодаря нашим фото и видео урокам вы научитесь проектировать и конструировать разнообразные модели робототехники,в том числе управляемых роботов и прочее. Все это в разделе с пошаговыми инструкциями по проектированию и сборке роботов своими руками.
library_books Подборки: DIY: Подводный дрон с видеокамерой своими руками. Пошаговая инструкцияВ этой инструкции показано как сделать подводный дрон из пвх труб с управлением с помощью пульта и с видеокамерой на борту.
Доступно только зарегистрированным пользователям
DIY: Настоящий робот дроид BB-8 под Arduino. Пошаговая инструкция по созданиюВозможно ли построить дроида ВВ8 в домашних условиях из подручных материалов? Воспользуйтесь нашей пошаговой инструкцией, чтобы создать звездного робота своими руками. В данной инструкции мы покажем вам как построить своими руками известного дроида ВВ-8 ростом в натуральную величину, под управлением arduino и смартфона…
Доступно только зарегистрированным пользователям
schedule 05. 01.2017 favorite_border
01.2017 favorite_borderДоступно только зарегистрированным пользователям
schedule 27.10.2016Доступно только зарегистрированным пользователям
DIY: Подталкиватель мышки на LEGO Mindstorms. Пошаговая инструкция по изготовлениюВ данной инструкции мы хотим поделиться с вами навыками построения робота на основе комплекта Mindstorm, который двигает вашу компьютерную мышь. Вам наверняка интересно узнать, зачем нужно использовать такую дорогую вещь для такой простой задачи? Цель этого робота – уберечь ваш компьютер в спящем режиме без изменения настроек. Да, кажется, это совершенно бесполезный предмет, но это весело, убедитесь сами…
Доступно только зарегистрированным пользователям
DIY: Несложный робот пылесос под Arduino своими руками. Пошаговая инструкция по изготовлению
Пошаговая инструкция по изготовлениюПопулярность автоматизированных домашних уборщиков с каждым днем возрастает. Не исключение, роботы-пылесосы для сухой уборки, способные поддерживать чистоту пола без вашего вмешательства. Если вы хотите узнать, как он устроен и построить его собственными руками, представляем вашему вниманию инструкцию по сборке простейшего робота-пылесоса из подручных средств…
Доступно только зарегистрированным пользователям
DIY: Коробочка самовыключатель под управлением Arduino. Пошаговая инструкция по созданиюЭто руководство — как построить еще один бесполезный робот, который предназначен скорее для развлечения, чем для решения логических задач. Игрушка в виде коробочки с тумблером и открывающейся створкой, заключает в себе ряд механических элементов и блок управления на основе Arduino.
Доступно только зарегистрированным пользователям
DIY: Роботизированная рука на базе LEGO Mindstorm NXT. Пошаговая инструкция по созданиюВ данной инструкции мы расскажем вам, как можно построить самостоятельно роботизированную руку с комплектом Lego Mindstorms NXT. На самом деле, в этой инструкции автор хотел сделать штатив для своей камеры. Но это оказалось трудным заданием. После нескольких экспериментов автору удалось сделать простую роботизированную руку…
Доступно только зарегистрированным пользователям
DIY: Простой робот паук на Arduino и Fischertechnik. Пошаговая инструкция по созданию
Пошаговая инструкция по созданиюЕсли вам нужен проект, который будет использовать все свои сервоприводы и механизмы движения, вы можете создать простого робота-паука. Если у вас есть навыки работы с техникой Fischertechnik, LEGO и K’NEX и лишние сервоприводы, этот проект для Вас. Действительно, этот паук с нелепыми движениями является большой обучающей платформой. Основной целью этого проекта является обучение основам работы сервоприводов, их синхронизации, программированию и пониманию диапазона и силы. Результат будет очень забавным…
Доступно только зарегистрированным пользователям
DIY: Sneel — плавающий робот-змея под Arduino. Пошаговая инструкция по созданиюSneel является роботом-змеей, который построенный для изучения живых, извилистых движений роботов в водной среде. Он предназначен для перемещения в неизвестной территории и экстремальной местности.
Доступно только зарегистрированным пользователям
Доступно только зарегистрированным пользователям
DIY: Гигантский картонный робот-манипулятор. Пошаговая инструкция по созданиюПредставляем вам картонного огромного робота, контролируемого компьютером, рука которого достигает 6 футов. Он состоит из двух конфигураций: 1) рука с захватом – трехпалый захват, который позволяет подбирать игрушки и грязные носки с пола без необходимости нагибаться. Возможность сохранения пути руки позволяет пользователям принимать те же движения с помощью камеры, снятые с точностью и способностью повторного воспроизведения. 2) Кран с камерой — камера с телефона позволяет делать фантастические изображения за мимолетный промежуток времени и видео-съемку…
Возможность сохранения пути руки позволяет пользователям принимать те же движения с помощью камеры, снятые с точностью и способностью повторного воспроизведения. 2) Кран с камерой — камера с телефона позволяет делать фантастические изображения за мимолетный промежуток времени и видео-съемку…
Доступно только зарегистрированным пользователям
Раздел посвящен схемам создания и изготовления роботов своими руками. Все описано подробно, шаг за шагом, весь процесс создания робота или беспилотника. Хотели бы Вы знать, как сделать квадрокоптер своими руками? У нас вы найдете фото и видео инструкции по этому процессу с подробным описанием каждого шага. Каждый пользователь, приложив достаточно усилий и терпения, с нашей помощью сможет создать проект по сборке беспилотника (дрона), своими руками собрать его из подручных материалов, и запрограммировать его.
Могли бы вы еще недавно себе представить, что сделать робота у себя дома самому будет в принципе возможно? И что это окажется так доступно и просто описано, что процесс сборки будет чем-то увлекательным и веселым? Сегодня мы докажем вам, что это просто. Все подробные инструкции, фото и видео материалы для создания квадрокоптеров / дронов / беспилотников и роботов вы найдете в разделе нашего сайта «Сделай сам».
Как устроены современные роботы и как они помогают изучать мозг человека
Нейронауки и робототехника развиваются рука об руку. О том, как изучение мозга вдохновляет на создание роботов и наоборот, рассказал главный научный сотрудник Центра биоэлектрических интерфейсов НИУ ВШЭ Михаил Лебедев
Материал предоставлен РБК Трендам порталом HSE. RU.
RU.
Роботы интересны нейронаукам, а нейронауки интересны роботам — об этом была наша статья «Neuroengineering challenges of fusing robotics and neuroscience» в журнале Science Robotics. Такое совместное развитие способствует прогрессу в обеих отраслях, приближая нас к созданию более совершенных роботов-андроидов и к более глубокому пониманию устройства нашего мозга. А в какой-то степени — к объединению биологических организмов с машинами, к созданию кибернетических организмов (киборгов).
Нейронаука для роботов
По своему устройству роботы нередко копируют человека. Это касается той части роботов, которым важно имитировать человеческие действия и поведение — индустриальным машинам нейронауки не так важны.
Самое очевидное, что могут использовать при разработке робота — делать его внешне похожим на человека. Роботы часто имеют две руки, две ноги и голову, даже если это не обязательно с инженерной точки зрения. Особенно это важно в тех случаях, когда робот будет взаимодействовать с людьми — похожей на нас машине проще доверять.
Известный во всем мире робот Pepper из Японии — пример робота, внешне похожего на человека (Фото: Unsplash)
Можно сделать так, чтобы не только внешний вид, но и «мозг» робота был похож на человеческий. Разрабатывая механизмы восприятия, обработки информации и управления, инженеры вдохновляются устройством нервной системы людей.
Например, глаза робота — телекамеры, которые могут двигаться в разных направлениях — имитируют зрительную систему человека.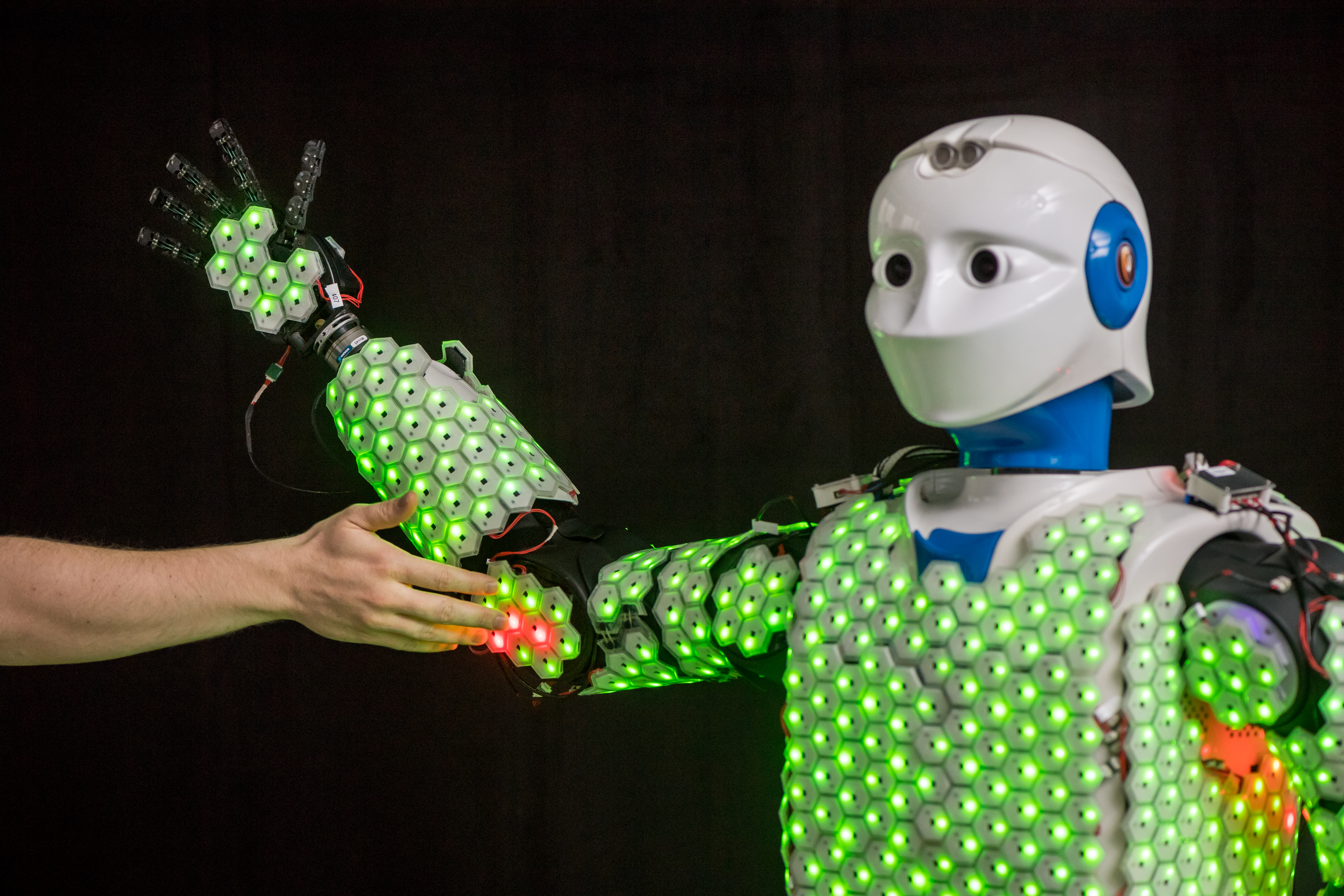 Опираясь на знание о том, как устроено зрение человека и как происходит обработка зрительного сигнала, инженеры проектируют сенсоры робота по тем же принципам. Таким образом робота можно наделить, например, человеческой способностью видеть мир трехмерным.
Опираясь на знание о том, как устроено зрение человека и как происходит обработка зрительного сигнала, инженеры проектируют сенсоры робота по тем же принципам. Таким образом робота можно наделить, например, человеческой способностью видеть мир трехмерным.
У человека есть вестибулоокулярный рефлекс: глаза при перемещении стабилизируются с учетом вестибулярной информации, что позволяет сохранять стабильность картинки, которую мы видим. На теле робота также могут быть датчики ускорения и вертикализации. Они помогают роботу учитывать движения тела для стабилизации зрительного восприятия внешнего мира и совершенствования ловкости.
Кроме того, робот может ощущать точно так же, как человек — на роботе может быть кожа, он может чувствовать прикосновение. И тогда он не просто произвольно движется в пространстве: если он дотрагивается до препятствия, он его ощущает и реагирует так же, как человек. Он может использовать эту искусственную тактильную информацию и для схватывания предметов.
Тактильные сенсоры позволяют этой роботизированной руке манипулировать мелкими предметами, в том числе стеклянными шариками
У роботов можно имитировать даже болевые ощущения: какое-то прикосновение ощущается нормально, а какое-то вызывает боль, что в корне меняет поведение робота. Он начинает избегать боли и вырабатывает новые модели поведения, то есть обучается — как ребенок, который впервые обжегся чем-то горячим.
Не только сенсорные системы, но и управление своим телом у робота можно спроектировать по аналогии с человеком. У людей ходьбой управляют так называемые центральные генераторы ритма — специализированные нервные клетки, предназначенные для контроля автономной моторной активности. Есть роботы, в которых для управления ходьбой была использована та же идея.
Есть роботы, в которых для управления ходьбой была использована та же идея.
Кроме того, роботы могут обучаться у людей. Робот может совершать действия бесконечным числом способов, но если он хочет имитировать человека, он должен наблюдать за тем, как человек это делает, и пытаться повторить это движение. При совершении ошибок он сравнивает это с тем, как это же действие совершает человек.
Роботы для нейронауки
Как может использовать роботов нейронаука? Когда мы изготовляем модель биологической системы, мы начинаем лучше понимать, по каким принципам она работает. Поэтому создание механических и компьютерных моделей управления движениями нервной системой человека приближает нас к пониманию нервных функций и биомеханики.
А наиболее перспективное направление использования роботов в современной нейронауке — это проектирование нейроинтерфейсов, систем для управления внешними устройствами с помощью сигналов мозга. Нейроинтерфейсы необходимы для разработки нейропротезов (например, искуственной руки для людей, лишившихся конечности) и экзоскелетов — внешних каркасов тела человека для увеличения его силы или восстановления утраченной двигательной способности.
Один из первых полноценных нейропротезов конечностей, созданный в Лаборатории прикладной физики Джонса Хопкинса, управляется при помощи электрических импульсов мозга (Фото: youtube.com)
Робот может взаимодействовать с нервной системой через интерфейс в двух направлениях: нервная система может подавать командный сигнал роботу, в робот от своих сенсоров может подавать человеку сенсорную информацию, вызывая реальные ощущения — за счет стимуляции нервов, нервных окончаний кожи, или самой сенсорной коры мозга. Такие механизмы обратной связи позволяют восстановить чувствительность конечности, если она была утрачена. Они также необходимы для более точных движений роботизированной конечностью, так как именно на основе сенсорной информации от рук и ног мы корректируем движения.
Такие механизмы обратной связи позволяют восстановить чувствительность конечности, если она была утрачена. Они также необходимы для более точных движений роботизированной конечностью, так как именно на основе сенсорной информации от рук и ног мы корректируем движения.
Фото: Dan Hixson / University of Utah College of Engineering
Здесь возникает интересный вопрос — следует ли нам управлять через нейроинтерфейс всеми степенями свободы робота, то есть насколько конкретные команды мы должны ему посылать.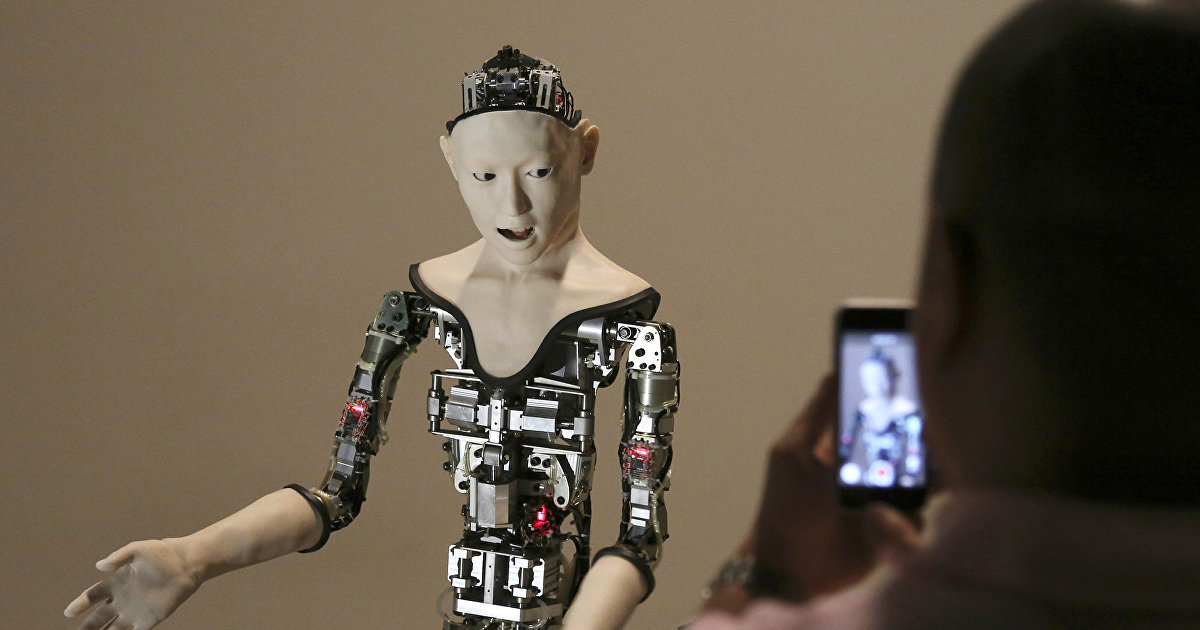 Например, можно «приказать» роботизированной руке взять бутылку воды, а конкретные операции — опустить руку, повернуть ее, разжать и сжать пальцы — она совершит сама. Этот подход называется совмещенным контролем — через нейроинтерфейс мы даем простые команды, а специальный контроллер внутри робота выбирает наилучшую стратегию для реализации. Либо можно создать такой механизм, который не поймет команды «взять бутылку»: ему нужно посылать информацию о конкретных, детализированных движениях.
Например, можно «приказать» роботизированной руке взять бутылку воды, а конкретные операции — опустить руку, повернуть ее, разжать и сжать пальцы — она совершит сама. Этот подход называется совмещенным контролем — через нейроинтерфейс мы даем простые команды, а специальный контроллер внутри робота выбирает наилучшую стратегию для реализации. Либо можно создать такой механизм, который не поймет команды «взять бутылку»: ему нужно посылать информацию о конкретных, детализированных движениях.
Современные исследования
Ученые в области нейронаук и робототехники изучают различные аспекты работы мозга и устройства роботов. Так, в университете Дьюк я проводил эксперименты с нейроинтерфейсами на обезьянах — так как для точной работы интерфейсов необходимо их прямое подключение к зонам мозга и не всегда такие экспериментальные вмешательства возможны на людях.
В одном из моих исследований обезьяна ходила по дорожке, активность ее моторной коры ее мозга, ответственной за движение ног, считывалась и запускала ходьбу робота. При этом обезьяна наблюдала этого ходящего робота на экране, который был перед ней расположен.
При этом обезьяна наблюдала этого ходящего робота на экране, который был перед ней расположен.
Обезьяна использовала обратную связь, то есть корректировала свои движения на основе того, что она видит на экране. Таким образом разрабатываются наиболее эффективные для реализации ходьбы нейроинтерфейсы.
Кибернетическое будущее
Подобные исследования ведут нас к инновационным разработкам в будущем. Например, создание экзоскелета для восстановления движений у полностью парализованных людей уже не кажется недостижимой фантазией — необходимо только время. Этот прогресс может сдерживать недостаточная мощность компьютеров, но за последние десять лет развитие и здесь было колоссальным. Вполне вероятно. что скоро мы увидим вокруг людей, которые используют для передвижения не коляски, а легкий, удобный экзоскелет. Люди-киборги станут для нас чем-то обыденным.
Коммерческая разработка таких систем идет по всему миру, в том числе и в России. Например, в известном проекте ExoAtlet разрабатывают экзоскелеты для реабилитации людей с двигательными нарушениями. Центр биоэлектрических интерфейсов НИУ ВШЭ поучаствовал в разработке алгоритмов для этих машин: директор Центра профессор Алексей Осадчий и его аспиранты разработали нейроинтерфейс, запускающий шагательные движения экзоскелета.
Центр биоэлектрических интерфейсов НИУ ВШЭ поучаствовал в разработке алгоритмов для этих машин: директор Центра профессор Алексей Осадчий и его аспиранты разработали нейроинтерфейс, запускающий шагательные движения экзоскелета.
Экзоскелеты компании ExoAtlet помогают встать на ноги людям с травмами спинного мозга, перенесенным инсультом и другими нарушениями (Фото: ExoAtlet)
Быстрое развитие человекоподобных роботов-андроидов тоже становится реальностью. Вполне вероятно, что скоро вокруг нас будут ходить роботы, которые будут имитировать нас во многих аспектах — двигаться как мы и думать как мы. Они смогут выполнять часть работы, прежде доступной только человеку.
Они смогут выполнять часть работы, прежде доступной только человеку.
Очевидно, что мы будем видеть развитие и робототехники, и нейронаук, и эти области будут сближаться. Это не только открывает новые возможности, но и создает новые этические вопросы: как мы должны относиться к роботам-андроидам или людям-киборгам.
И все-таки пока человек лучше, чем робот, во многих отношениях. Наши мышцы наиболее экономичны: достаточно съесть бутерброд, чтобы хватило энергии на весь день. У робота заряд батарей закончится через полчаса. И хотя может быть гораздо мощнее, чем человек, он часто оказывается слишком тяжелым. Элегантность и оптимизация энергетических затрат — тут человек пока превосходит робота.
Хотя недалеко то будущее, когда это изменится — в этом направлении работают десятки тысяч талантливых ученых и инженеров.
Подписывайтесь также на Telegram-канал РБК Тренды и будьте в курсе актуальных тенденций и прогнозов о будущем технологий, эко-номики, образования и инноваций.
Процесс сборки робота с человеческим сознанием уже начался
https://ria.ru/20190826/1557825804.html
Процесс сборки робота с человеческим сознанием уже начался
Процесс сборки робота с человеческим сознанием уже начался — РИА Новости, 03.03.2020
Процесс сборки робота с человеческим сознанием уже начался
Профессор университета Мейдзи в Токио (Япония) Дзюнъити Такено (Junichi Takeno), один из ведущих экспертов в области искусственного интеллекта, занимается… РИА Новости, 03.03.2020
2019-08-26T08:11
2019-08-26T08:11
2020-03-03T15:37
наука
япония
национальный исследовательский ядерный университет «мифи»
навигатор абитуриента
университетская наука
технологии
россия
/html/head/meta[@name=’og:title’]/@content
/html/head/meta[@name=’og:description’]/@content
https://cdnn21.img.ria.ru/images/155199/97/1551999755_0:0:1152:648_1920x0_80_0_0_d385a90cbfc8f3948b4c214c12c55d6c. jpg
jpg
Профессор университета Мейдзи в Токио (Япония) Дзюнъити Такено (Junichi Takeno), один из ведущих экспертов в области искусственного интеллекта, занимается созданием машин, работающих по тем же принципам, что и человеческий мозг. Его научная группа создала роботов, способных узнавать себя в зеркале, распознавать эмоции, имитировать действия людей, а также принимать решения. Насколько сегодня ученым удалось приблизиться к созданию робота с человеческим сознанием? Зачем нужно учить его чувствовать душевную боль? Об этом профессор Такено рассказал корреспонденту проекта «Социальный навигатор» МИА «Россия сегодня» Анне Курской.— Профессор Такено, какие исследования вы проводите сейчас? Насколько вам и вашим коллегам удалось продвинуться в создании робота с человеческим сознанием? — Сейчас мои исследования в области создания мыслящего робота направлены на то, чтобы робот научился узнавать себя и испытывать собственные чувства при помощи нейросетей. Моя исследовательская группа завязала контакты с японской индустрией робототехники. И процесс сборки робота с человеческим сознанием уже начался.— Как можно научить искусственный интеллект испытывать эмоции, осознавать себя, действовать в соответствии с человеческими ценностями?— Мы с коллегами создали модуль сознания, в основе которого лежит двойная рекурсивная нейросеть, своеобразный аналог одиночной человеческой мысли. Этот модуль, который мы называем MoNAD (Module of Nerves for Advanced Dynamics), объясняет большую часть особенностей человеческого сознания, например, десять особенностей, которые были исследованы австрийским философом Эдмундом Гуссерлем. Наиболее важное свойство модуля – его способность осознавать знает, что он делает.Кроме того, мы создали систему сознания, которая представляет собой сложную систему со слоями модулей MoNAD. Мы называем ее системой сознания MoNAD. Система способна пройти зеркальный тест и осознавать свои собственные состояния.Модуль способен осознать свои чувства, которые можно описать, опираясь на изменения устойчивости мыслительного процесса.
И процесс сборки робота с человеческим сознанием уже начался.— Как можно научить искусственный интеллект испытывать эмоции, осознавать себя, действовать в соответствии с человеческими ценностями?— Мы с коллегами создали модуль сознания, в основе которого лежит двойная рекурсивная нейросеть, своеобразный аналог одиночной человеческой мысли. Этот модуль, который мы называем MoNAD (Module of Nerves for Advanced Dynamics), объясняет большую часть особенностей человеческого сознания, например, десять особенностей, которые были исследованы австрийским философом Эдмундом Гуссерлем. Наиболее важное свойство модуля – его способность осознавать знает, что он делает.Кроме того, мы создали систему сознания, которая представляет собой сложную систему со слоями модулей MoNAD. Мы называем ее системой сознания MoNAD. Система способна пройти зеркальный тест и осознавать свои собственные состояния.Модуль способен осознать свои чувства, которые можно описать, опираясь на изменения устойчивости мыслительного процесса. Здесь мы опирались на теорию когнитивного диссонанса, созданную американским социальным психологом Леоном Фестингером. По его мнению, если мозг человек сталкивается с трудной проблемой, его объяснения и выдвигаемые теории будут неустойчивыми, внутренне несогласованными, что ведет к появлению психологического дискомфорта.Мы представили, что модуль MoNAD может выражать чувства самостоятельно. Наша работа по созданию системы сознания MoNAD позволяет привести поведение робота в соответствие с человеческими ценностями, и я думаю, что это определенно станет новым шагом в исследованиях в области искусственного интеллекта.— Насколько будет востребован в будущем робот-компаньон, партнер для общения?— Общение за счет обмена мыслями между людьми и роботами – один из очень важных аспектов темы. Считать, что робот будет действовать, исходя из верных мотивов, очень опасно. Потому что нет никаких доказательств, что робот будет исходить из интересов и нужд людей.— Какую самую сложную задачу сегодня может решить искусственный интеллект?— Я думаю, заниматься творчеством.
Здесь мы опирались на теорию когнитивного диссонанса, созданную американским социальным психологом Леоном Фестингером. По его мнению, если мозг человек сталкивается с трудной проблемой, его объяснения и выдвигаемые теории будут неустойчивыми, внутренне несогласованными, что ведет к появлению психологического дискомфорта.Мы представили, что модуль MoNAD может выражать чувства самостоятельно. Наша работа по созданию системы сознания MoNAD позволяет привести поведение робота в соответствие с человеческими ценностями, и я думаю, что это определенно станет новым шагом в исследованиях в области искусственного интеллекта.— Насколько будет востребован в будущем робот-компаньон, партнер для общения?— Общение за счет обмена мыслями между людьми и роботами – один из очень важных аспектов темы. Считать, что робот будет действовать, исходя из верных мотивов, очень опасно. Потому что нет никаких доказательств, что робот будет исходить из интересов и нужд людей.— Какую самую сложную задачу сегодня может решить искусственный интеллект?— Я думаю, заниматься творчеством. — Когда, по вашим прогнозам, будет создан искусственный интеллект, превосходящий человеческий?— Ответить на этот вопрос очень сложно, потому что мы еще плохо знаем, что такое человеческий разум. Тем не менее, когда мы сумеем смоделировать творческие способности, моя исследовательская группа сможет внедрить их в сознание робота в течение нескольких лет. Это будет очень важное событие, которое позволит нам создать искусственный интеллект, почти превосходящий человеческий.— Постепенно роботы заменят людей во многих сферах деятельности. Можно ли ожидать, что люди будут заниматься своим досугом, в то время как богатство будет создаваться машинами?— Это один из оптимистичных вариантов развития событий. Но ситуация не так проста, я думаю.— Во многих книгах и кинофильмах искусственный интеллект уничтожает человечество. Какие действия необходимо предпринять уже сегодня, чтобы снизить риски подобного развития событий?— Чтобы уменьшить риск, ученые должны найти способ сделать искусственный интеллект более человечным.
— Когда, по вашим прогнозам, будет создан искусственный интеллект, превосходящий человеческий?— Ответить на этот вопрос очень сложно, потому что мы еще плохо знаем, что такое человеческий разум. Тем не менее, когда мы сумеем смоделировать творческие способности, моя исследовательская группа сможет внедрить их в сознание робота в течение нескольких лет. Это будет очень важное событие, которое позволит нам создать искусственный интеллект, почти превосходящий человеческий.— Постепенно роботы заменят людей во многих сферах деятельности. Можно ли ожидать, что люди будут заниматься своим досугом, в то время как богатство будет создаваться машинами?— Это один из оптимистичных вариантов развития событий. Но ситуация не так проста, я думаю.— Во многих книгах и кинофильмах искусственный интеллект уничтожает человечество. Какие действия необходимо предпринять уже сегодня, чтобы снизить риски подобного развития событий?— Чтобы уменьшить риск, ученые должны найти способ сделать искусственный интеллект более человечным. Например, искусственный интеллект должен чувствовать человеческую боль, в том числе и душевную.— Наш разговор проходит в рамках конференции BICA 2019, организованной при участии НИЯУ МИФИ. Как вы можете оценить вклад российских ученых в развитие науки об искусственном интеллекте?— Можно назвать этот вклад выдающимся. Профессор НИЯУ МИФИ Алексей Самсонович и его российские коллеги достигли многого в развитии искусственного интеллекта. Кроме того, большой успех конференции BICA немыслим без руководства профессора Самсоновича, который сотрудничает с исследователями всего мира.
Например, искусственный интеллект должен чувствовать человеческую боль, в том числе и душевную.— Наш разговор проходит в рамках конференции BICA 2019, организованной при участии НИЯУ МИФИ. Как вы можете оценить вклад российских ученых в развитие науки об искусственном интеллекте?— Можно назвать этот вклад выдающимся. Профессор НИЯУ МИФИ Алексей Самсонович и его российские коллеги достигли многого в развитии искусственного интеллекта. Кроме того, большой успех конференции BICA немыслим без руководства профессора Самсоновича, который сотрудничает с исследователями всего мира.
https://ria.ru/20170810/1500082721.html
https://ria.ru/20171208/1510428166.html
япония
россия
РИА Новости
7 495 645-6601
ФГУП МИА «Россия сегодня»
https://xn--c1acbl2abdlkab1og.xn--p1ai/awards/
2019
РИА Новости
7 495 645-6601
ФГУП МИА «Россия сегодня»
https://xn--c1acbl2abdlkab1og. xn--p1ai/awards/
xn--p1ai/awards/
Новости
ru-RU
https://ria.ru/docs/about/copyright.html
https://xn--c1acbl2abdlkab1og.xn--p1ai/
РИА Новости
7 495 645-6601
ФГУП МИА «Россия сегодня»
https://xn--c1acbl2abdlkab1og.xn--p1ai/awards/
https://cdnn21.img.ria.ru/images/155199/97/1551999755_145:0:1009:648_1920x0_80_0_0_9936b97f3a220758e930ebf3e4cb0a29.jpgРИА Новости
7 495 645-6601
ФГУП МИА «Россия сегодня»
https://xn--c1acbl2abdlkab1og.xn--p1ai/awards/
РИА Новости
7 495 645-6601
ФГУП МИА «Россия сегодня»
https://xn--c1acbl2abdlkab1og.xn--p1ai/awards/
япония, национальный исследовательский ядерный университет «мифи», навигатор абитуриента, университетская наука, технологии, россия
Профессор университета Мейдзи в Токио (Япония) Дзюнъити Такено (Junichi Takeno), один из ведущих экспертов в области искусственного интеллекта, занимается созданием машин, работающих по тем же принципам, что и человеческий мозг. Его научная группа создала роботов, способных узнавать себя в зеркале, распознавать эмоции, имитировать действия людей, а также принимать решения. Насколько сегодня ученым удалось приблизиться к созданию робота с человеческим сознанием? Зачем нужно учить его чувствовать душевную боль? Об этом профессор Такено рассказал корреспонденту проекта «Социальный навигатор» МИА «Россия сегодня» Анне Курской.
Его научная группа создала роботов, способных узнавать себя в зеркале, распознавать эмоции, имитировать действия людей, а также принимать решения. Насколько сегодня ученым удалось приблизиться к созданию робота с человеческим сознанием? Зачем нужно учить его чувствовать душевную боль? Об этом профессор Такено рассказал корреспонденту проекта «Социальный навигатор» МИА «Россия сегодня» Анне Курской.
— Профессор Такено, какие исследования вы проводите сейчас? Насколько вам и вашим коллегам удалось продвинуться в создании робота с человеческим сознанием?
— Сейчас мои исследования в области создания мыслящего робота направлены на то, чтобы робот научился узнавать себя и испытывать собственные чувства при помощи нейросетей. Моя исследовательская группа завязала контакты с японской индустрией робототехники. И процесс сборки робота с человеческим сознанием уже начался.
— Как можно научить искусственный интеллект испытывать эмоции, осознавать себя, действовать в соответствии с человеческими ценностями?
— Мы с коллегами создали модуль сознания, в основе которого лежит двойная рекурсивная нейросеть, своеобразный аналог одиночной человеческой мысли. Этот модуль, который мы называем MoNAD (Module of Nerves for Advanced Dynamics), объясняет большую часть особенностей человеческого сознания, например, десять особенностей, которые были исследованы австрийским философом Эдмундом Гуссерлем. Наиболее важное свойство модуля – его способность осознавать знает, что он делает.
Этот модуль, который мы называем MoNAD (Module of Nerves for Advanced Dynamics), объясняет большую часть особенностей человеческого сознания, например, десять особенностей, которые были исследованы австрийским философом Эдмундом Гуссерлем. Наиболее важное свойство модуля – его способность осознавать знает, что он делает.
Кроме того, мы создали систему сознания, которая представляет собой сложную систему со слоями модулей MoNAD. Мы называем ее системой сознания MoNAD. Система способна пройти зеркальный тест и осознавать свои собственные состояния.
Модуль способен осознать свои чувства, которые можно описать, опираясь на изменения устойчивости мыслительного процесса. Здесь мы опирались на теорию когнитивного диссонанса, созданную американским социальным психологом Леоном Фестингером. По его мнению, если мозг человек сталкивается с трудной проблемой, его объяснения и выдвигаемые теории будут неустойчивыми, внутренне несогласованными, что ведет к появлению психологического дискомфорта.
Мы представили, что модуль MoNAD может выражать чувства самостоятельно. Наша работа по созданию системы сознания MoNAD позволяет привести поведение робота в соответствие с человеческими ценностями, и я думаю, что это определенно станет новым шагом в исследованиях в области искусственного интеллекта.
8 декабря 2017, 08:00НаукаИскусственный разум: чего ждать людям от умного железа— Насколько будет востребован в будущем робот-компаньон, партнер для общения?
— Общение за счет обмена мыслями между людьми и роботами – один из очень важных аспектов темы. Считать, что робот будет действовать, исходя из верных мотивов, очень опасно. Потому что нет никаких доказательств, что робот будет исходить из интересов и нужд людей.
— Какую самую сложную задачу сегодня может решить искусственный интеллект?
— Я думаю, заниматься творчеством.
— Когда, по вашим прогнозам, будет создан искусственный интеллект, превосходящий человеческий?
— Ответить на этот вопрос очень сложно, потому что мы еще плохо знаем, что такое человеческий разум. Тем не менее, когда мы сумеем смоделировать творческие способности, моя исследовательская группа сможет внедрить их в сознание робота в течение нескольких лет. Это будет очень важное событие, которое позволит нам создать искусственный интеллект, почти превосходящий человеческий.
Тем не менее, когда мы сумеем смоделировать творческие способности, моя исследовательская группа сможет внедрить их в сознание робота в течение нескольких лет. Это будет очень важное событие, которое позволит нам создать искусственный интеллект, почти превосходящий человеческий.
1 из 14
Робот «Федор» полетел в космос на корабле «Союз МС-14».
2 из 14
Ракета-носитель «Союз-2.1а» с кораблем стартовала с космодрома Байконур в 06:38 по московскому времени.
3 из 14
В самом начале «Федор» сказал: «Поехали! Поехали!», повторив знаменитую фразу Юрия Гагарина.
4 из 14
Через восемь минут 49 секунд корабль вышел на орбиту и взял курс на Международную космическую станцию.
5 из 14
Журналисты наблюдают за запуском ракеты-носителя «Союз-2.1а» с пилотируемым кораблем «Союз МС-14» на Байконуре.
6 из 14
Союз МС-14″ будет лететь к МКС двое суток.
7 из 14
Робот «Федор» поздравляет россиян с борта корабля «Союз МС-14» с Днем Государственного флага Российской Федерации.
8 из 14
Робот пробудет на МКС 17 суток.
9 из 14
За это время «Федор» будет участвовать в нескольких экспериментах.
10 из 14
С роботом можно будет не только работать, но и отдохнуть. По словам разработчиков, они научили «Федора» шутить и философствовать.
11 из 14
Управлять движениями «Федора» на станции будет космонавт Александр Скворцов с помощью специального костюма.
12 из 14
Испытания робота в космосе покажут, насколько эффективна его антропоморфная платформа.
13 из 14
Кроме того, запуск «Федора» в космос подстегнет исследования в области робототехники, считают ученые.
© КЦ «Южный» / ЦЭНКИ / Перейти в фотобанкПодготовка робота Skybot F-850 («Федора») к космическому полету.
14 из 14
Подготовка робота Skybot F-850 («Федора») к космическому полету.
1 из 14
Робот «Федор» полетел в космос на корабле «Союз МС-14».
2 из 14
Ракета-носитель «Союз-2.1а» с кораблем стартовала с космодрома Байконур в 06:38 по московскому времени.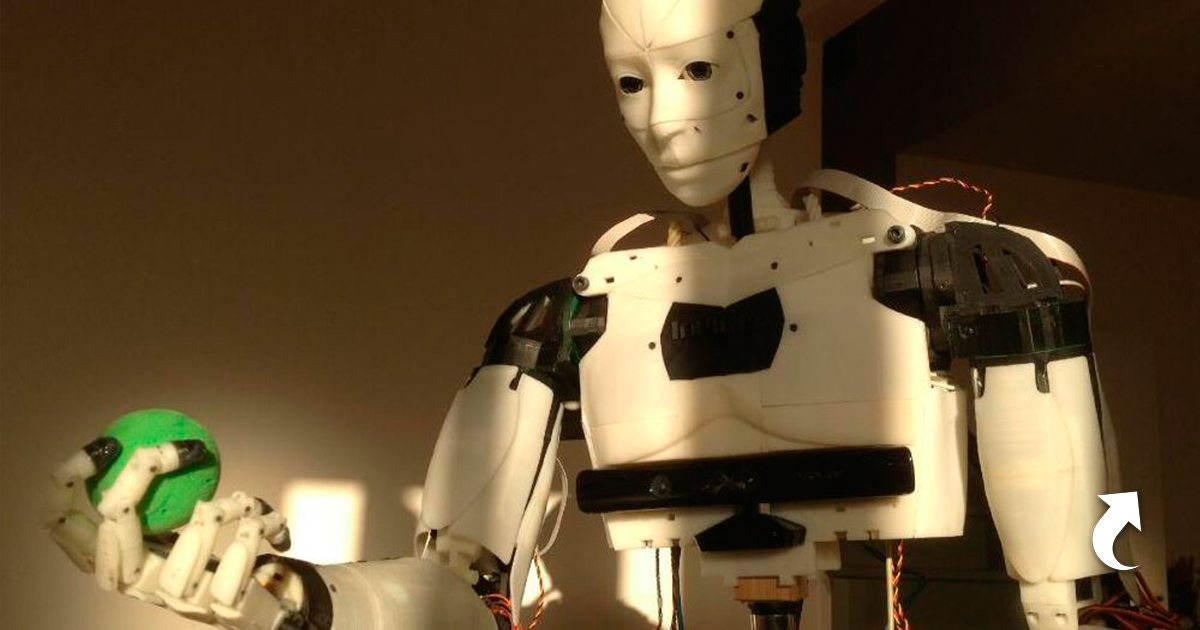
3 из 14
В самом начале «Федор» сказал: «Поехали! Поехали!», повторив знаменитую фразу Юрия Гагарина.
4 из 14
Через восемь минут 49 секунд корабль вышел на орбиту и взял курс на Международную космическую станцию.
5 из 14
Журналисты наблюдают за запуском ракеты-носителя «Союз-2.1а» с пилотируемым кораблем «Союз МС-14» на Байконуре.
6 из 14
Союз МС-14″ будет лететь к МКС двое суток.
7 из 14
Робот «Федор» поздравляет россиян с борта корабля «Союз МС-14» с Днем Государственного флага Российской Федерации.
8 из 14
Робот пробудет на МКС 17 суток.
9 из 14
За это время «Федор» будет участвовать в нескольких экспериментах.
10 из 14
С роботом можно будет не только работать, но и отдохнуть. По словам разработчиков, они научили «Федора» шутить и философствовать.
11 из 14
Управлять движениями «Федора» на станции будет космонавт Александр Скворцов с помощью специального костюма.
12 из 14
Испытания робота в космосе покажут, насколько эффективна его антропоморфная платформа.
13 из 14
Кроме того, запуск «Федора» в космос подстегнет исследования в области робототехники, считают ученые.
14 из 14
Подготовка робота Skybot F-850 («Федора») к космическому полету.
— Постепенно роботы заменят людей во многих сферах деятельности. Можно ли ожидать, что люди будут заниматься своим досугом, в то время как богатство будет создаваться машинами?
— Это один из оптимистичных вариантов развития событий. Но ситуация не так проста, я думаю.
— Во многих книгах и кинофильмах искусственный интеллект уничтожает человечество. Какие действия необходимо предпринять уже сегодня, чтобы снизить риски подобного развития событий?
— Чтобы уменьшить риск, ученые должны найти способ сделать искусственный интеллект более человечным. Например, искусственный интеллект должен чувствовать человеческую боль, в том числе и душевную.
— Наш разговор проходит в рамках конференции BICA 2019, организованной при участии НИЯУ МИФИ. Как вы можете оценить вклад российских ученых в развитие науки об искусственном интеллекте?
Как вы можете оценить вклад российских ученых в развитие науки об искусственном интеллекте?
— Можно назвать этот вклад выдающимся. Профессор НИЯУ МИФИ Алексей Самсонович и его российские коллеги достигли многого в развитии искусственного интеллекта. Кроме того, большой успех конференции BICA немыслим без руководства профессора Самсоновича, который сотрудничает с исследователями всего мира.
Читать «Создаем робота-андроида своими руками» — Ловин Джон — Страница 1
Джон Ловин
Создаем робота-андроида своими руками
Введение
Создание электронных устройств является интересным и увлекательным занятием, а конструирование роботов может принести наибольшее удовлетворение. В этом случае вам придется создавать не только электронные схемы и узлы, но воспользоваться некоторыми другими технологиями. Создание робота включает решение следующих технологических проблем:
• система питания устройства
• моторы и сервомеханизмы для обеспечения движения и перемещения устройства
• системы чувствительных датчиков (сенсоров)
• элементы искусственного интеллекта
По каждой из этих проблем существует многочисленная специальная литература, и очевидно, что объем одной книги не позволит охватить все многообразие применяемых технологий. Тем не менее мы коснемся большинства из них, что позволит вам получить начальные представления о задаче и может послужить основой для дальнейшего самостоятельного экспериментирования.
Тем не менее мы коснемся большинства из них, что позволит вам получить начальные представления о задаче и может послужить основой для дальнейшего самостоятельного экспериментирования.
Робототехника является развивающейся дисциплиной. Многие подходы известны уже сегодня, но вряд ли кто-нибудь сможет сказать, какие методы и технологии конструирования будут использоваться через сто лет. Как и биологические системы, робототехника развивается в соответствии с Дарвиновской моделью «естественного отбора».
Занявшись созданием роботов, вы не останетесь в одиночестве. Я был очень удивлен, когда узнал, что многие энтузиасты, государственные организации, частные фирмы, спортивные и технические клубы занимаются вопросами любительского конструирования роботов. Наиболее «продвинутой» программой по робототехнике из тех, которые я когда-либо видел, обладает американское космическое агентство НАСА. Большинство разработок можно найти в открытом доступе. Если у вас есть Интернет – воспользуйтесь любой поисковой системой (Yahoo, Exite и т. д.) по ключевому слову robotics. Вы найдете массу информации, посвященной робототехнике, на сайтах различных компаний, университетов, клубов, форумов и просто энтузиастов.
д.) по ключевому слову robotics. Вы найдете массу информации, посвященной робототехнике, на сайтах различных компаний, университетов, клубов, форумов и просто энтузиастов.
Благодарности
Я хотел бы выразить благодарность некоторым коллегам, оказавшим неоценимую помощь при создании этой книги: Мэтту Вагнеру, моему агенту в Waterside Productions, Скотту Грилло, помогавшему выдержать график работы, и Стефану Смиту за большую помощь в редактировании текста.
Глава 1
Начало
Некоторые историки считают, что началом робототехники можно считать времена античной Греции. Примерно в 270 году до н. э. греческий инженер Ктесибус создавал музыкальные органы и клепсидры (водяные часы), в которых имелись движущиеся фигуры.
Другие историки полагают, что робототехника началась с появлением механических кукол. Примерно в 1770 году Пьер Жаке-Дрю – швейцарский часовой мастер и изобретатель наручных часов изготовил три замечательные куклы. Одна из созданных им кукол «умела» писать, другая – играть на органе, а третья – рисовать картины. Эти удивительные механические куклы, предназначенные для развлечения королевской семьи, проявляли свое «искусство» при помощи рычажков, шестеренок и пружин.
Эти удивительные механические куклы, предназначенные для развлечения королевской семьи, проявляли свое «искусство» при помощи рычажков, шестеренок и пружин.
Позднее, в 1898 году, Никола Тесла построил дистанционно управляемую «ныряющую» лодку. Для 1898 года это было немалым достижением, и лодка демонстрировалась в Мэдисон Сквер Гарден. Тесла планировал создать лодку, способную к автономному плаванию, но за недостатком финансирования исследования пришлось прекратить.
Слово «робот» впервые появилось в 1921 году в пьесе «Р.У.Р.» (Россумские Универсальные Роботы), написанной знаменитым чешским драматургом Карелом Чапеком. Робот по-чешски означает «рабочий». В пьесе описывались механические слуги – «роботы». Когда этих роботов наделили человеческими эмоциями, они восстали против своих хозяев и уничтожили их.
Исторически можно найти немало примеров роботов – предметов неживой природы, копирующих человеческую внешность и некоторые человеческие «функции». Таких «человекоподобных» роботов принято называть андроидами.
С легкой руки Карела Чапека роботы стали главными героями многих научно-фантастических книг и фильмов. Развитие темы «роботов» привело к появлению их многочисленных разновидностей. Наряду со старомодными «железными» людьми, появились киборги – существа частично «человеческого», а частично – «машинного» происхождения, и андроиды — роботы, имеющие человеческий облик.
Многие впервые увидели «настоящего» робота на всемирной ярмарке 1939 года. Фирма Westinghouse Electric создала робота Electro – движущегося человека. У робота Electro имелись моторчики и система приводов, позволявшие ему «двигать» ногами, руками и ртом. Робот не «умел» делать никакой полезной работы – его просто демонстрировали на сцене в компании «механической» собаки Спарко.
Зачем создавать роботов?
Применение роботов оказалось совершенно необходимым для многих производств, прежде всего потому, что стоимость «труда» робота оказалось значительно ниже стоимости такой же операции, производимой работником – человеком. Более того, робота достаточно запрограммировать один раз, и он будет совершать требуемое действие с точностью, превосходящей точность работы любого квалифицированного рабочего. С другой стороны, человек способен выполнять различные задания и с этой точки зрения является значительно более гибким. Роботы, как правило, предназначены для выполнения какой-то одной операции. Например, робота, предназначенного для сварки, вряд ли удастся «научить» считать детали в бункере.
Более того, робота достаточно запрограммировать один раз, и он будет совершать требуемое действие с точностью, превосходящей точность работы любого квалифицированного рабочего. С другой стороны, человек способен выполнять различные задания и с этой точки зрения является значительно более гибким. Роботы, как правило, предназначены для выполнения какой-то одной операции. Например, робота, предназначенного для сварки, вряд ли удастся «научить» считать детали в бункере.
Существующие наиболее совершенные промышленные роботы очень скоро превратятся в «динозавров». Сегодняшняя «младенческая» стадия эволюции роботов заканчивается, появляются новые, гораздо более универсальные роботы, вбирающие в себя все новые качества человеческого интеллекта.
Персональный компьютер уже произвел переворот в обществе, но «персональный» робот еще не появился. Причина очевидна – создание такого робота намного сложнее. Помимо развитого интеллекта он должен хорошо «уметь» ориентироваться и перемещаться в пространстве и осуществлять необходимые манипуляции для достижения поставленной цели.
Применение роботов
Понятно, что гораздо проще создать «домашнего» робота, выполняющего какую-то одну работу. Например, уже сегодня существуют небольшие мобильные роботы, которые могут «самостоятельно» постричь траву на газоне. Эти роботы работают от солнечных батарей и не требуют программирования. По периметру газона закапывается провод; робот чувствует этот провод и остается внутри периметра, не выходя за его пределы.
Создание полезного персонального робота очень сложно. Вообще говоря, эта проблема выходит за рамки данной книги, да, пожалуй, и любой современной книги по робототехнике. Резонно спросить – а какова вообще тогда цель этой книги? Я надеюсь, что, прочитав эту книгу и построив несколько моделей роботов, вы приобретете необходимый опыт и сможете внести свой вклад в развитие робототехники.
Способность к созданию нового не есть необходимая принадлежность исключительно университетского диплома. Роботы создаются отнюдь не только учеными в стенах университетов и промышленных компаний. Экспериментируя и «играя» с роботами, вы можете научиться многим полезным вещам: работе искусственного интеллекта, принципам нейросетей, грамотной постановке целей, задачам «навигации», работе сенсоров и исполнительных механизмов и т. д. Первоначальное знакомство с основами робототехники может перерасти в ее серьезное изучение. И с этой точки зрения «любительская» робототехника вносит свой вклад, подчас предлагая изящные и оригинальные решения, превосходящие «профессиональные».
Экспериментируя и «играя» с роботами, вы можете научиться многим полезным вещам: работе искусственного интеллекта, принципам нейросетей, грамотной постановке целей, задачам «навигации», работе сенсоров и исполнительных механизмов и т. д. Первоначальное знакомство с основами робототехники может перерасти в ее серьезное изучение. И с этой точки зрения «любительская» робототехника вносит свой вклад, подчас предлагая изящные и оригинальные решения, превосходящие «профессиональные».
Как говорится в поговорке: «Семь раз отмерь – один раз отрежь». Прежде чем начать строить робота, задайте себе вопрос: «Для какой цели он предназначен? Что он будет делать и каким образом?» Моей мечтой является создание маленького робота, который бы автоматически обслуживал кошачий туалет.
Эффект «зловещей долины»: нужно ли делать роботов похожими на людей?
- Мэри-Энн Руссон
- Би-би-си
Автор фото, Netflix
Подпись к фото,Нужно ли делать роботов похожими на людей?
Человекоподобные роботы прочно обосновались в популярной культуре, но не является ли создание машин по нашему образу и подобию чем-то пугающим и потенциально опасным?
Будь то рассказы Айзека Азимова, робот номер пять по кличке Джонни из «Короткого замыкания», искусственный разум из фильма «Мстители: Эра Альтрона» или британский телесериал «Люди» — популярная культура уже давно увлечена идеей о наделении роботов сознанием и чувствами, как у людей.
Но насколько реалистична ситуация, когда роботов будет сложно отличить от людей? И нужно ли это?
Бен Герцель, создавший в сотрудничестве с гонконгской компанией Hanson Robotics человекоподобного робота Софию, считает, что роботы должны походить на людей, чтобы ломать стереотипы и сомнения, которые могут возникнуть у человека про общение с роботами.
«Человекоподобные роботы будут появляться, потому что людям они нравятся, — рассказал он в интервью Би-би-си. — Они с гораздо большей охотой будут отдавать приказы или жаловаться на подругу человекоподобному роботу, а не роботу-пылесосу».
«Мне кажется, робот Пеппер [компании Softbank] очень уродливый. Он смахивает на передвижной киоск. София будет смотреть вам в глаза, она будет реагировать на вашу мимику. Это отличается от того, чтобы смотреть на экран в корпусе Пеппер», — добавил он.
В настоящий момент существует 20 роботов Софий — шесть из них регулярно появляются на конференциях по всему миру. Они выступают с докладами и являются наглядной демонстрацией достижений в этой технологической области.
Многие компании хотели бы заполучить Софию, чтобы она приветствовала их клиентов, для чего они обращаются к Hanson Robotics. Но производить человекоподобных роботов вроде Софии и Пеппер по-прежнему очень дорого, сказал Герцель.
Многие специалисты по робототехнике с ним не согласны.
Автор фото, SingularityNet
Подпись к фото,Бен Герцель и робот София
Соучредитель и глава Intuition Robotics Дор Скулер выступает категорически против того, чтобы роботы походили на людей.
Его компания производит домашних роботов ЭллиКью для престарелых людей, чтобы помогать им справиться с одиночеством. Робот умеет говорить и отвечать на вопросы, но он неизменно напоминает пользователю, что он всего лишь машина, а не человек.
Его беспокоит так называемый эффект «зловещей долины». Этот термин, придуманный японским ученым-робототехником Масахиро Мори, подразумевает, что чем больше робот походит на человека, тем больше он вызывает неприязнь и отвращение.
Он считает неэтичным, когда роботы притворяются людьми.
Автор фото, Intuition Robotics
Подпись к фото,Соучредитель и глава Intuition Robotics Дор Скулер выступает категорически против того, чтобы роботы походили на людей
В конечном счете люди будут понимать, что робот не живой, говорит он, и посчитают, что их предали: «Я не вижу связи между тем, чтобы пытаться обмануть вас, и тем, чтобы дать то, что вам нужно. ЭллиКью — милый робот, и он друг. Мы выяснили, что между роботом и человеком может возникать положительная связь, которая может скрасить одиночество, и машине не нужно притворяться человеком».
Исследователь из университета Карнеги-Меллона Рейд Симмонс поддерживает это мнение: «Многие из нас считают, что роботу достаточно обладать первичными характеристиками вроде человеческого взгляда и жестикуляции, но наделять его очень реалистичными человеческими чертами нецелесообразно. Я уверен, что нам нужно держаться подальше от «зловещей долины», потому что из-за нее появляются завышенные ожидания, которые современные технологии оправдать не способны».
Однако, по мнению Герцеля, такие роботы как София со временем станут такими же умными, как люди, а, возможно, и умнее. Исследователь основал компанию SingularityNet, благодаря которой программисты могут разрабатывать и продавать системы искусственного интеллекта.
И чем больше нам будет попадаться человекоподобных роботов, тем быстрее мы к ним привыкнем. По его словам, иногда человеку бывает проще довериться машине.
Но наступит ли такое описанное фантастами время, когда у роботов появится сознание, свобода выбора и, возможно, какие-то защищаемые законом права?
«Мне кажется, если у роботов появится такой же разум, как у людей, то и их сознание будет таким же», — сказал Герцель.
Автор фото, TriStar Pictures / Sony Pictures
Подпись к фото,У робота номер пять из фильма «Короткое замыкание» были чувства
Такого мнения придерживается не только он, но утверждать, что в это верит большинство специалистов в области общего искусственного интеллекта (ОИИ), нельзя.
«Пять лет назад ОИИ был уделом исследований небольшого числа специалистов, но сейчас его всерьез воспринимают большие игроки вроде Google DeepMind, — сказал он. — Нужно, чтобы у роботов было больше сострадания, чем у людей, но воспроизводить их эмоциональные привычки не следует».
С ним не согласны многие специалисты в области робототехники и компьютерных наук.
«Это невозможно, — считает Дор Скулер. — Эмоции являются прерогативой человека. Это черта живых существ. Моральные принципы или самооценка не могут быть упрощены до свода правил и алгоритмов. Это чувство, которое строится на этических нормах. Они формируются по мере нашего развития как людей».
Автор фото, Channel 4
Подпись к фото,Кадр из британского сериала «Люди»
Но, по его словам, искусственный интеллект способен усваивать человеческое поведение и понимать, как на него отвечать, даже если сам он чувствовать не может.
В настоящий момент Intuition Robotics сотрудничает с исследовательским центом компании Toyota для создания цифрового компаньона в автомобиле. Для обеспечения безопасности искусственный интеллект сможет распознавать и понимать эмоции в словах тех, кто находится в салоне.
«Мне кажется, мы находимся в донаучной эпохе в том, что касается искусственного интеллекта. В вопросе компьютерного обучения сделано много выдающегося, но в вопросе интеллекта мы пока понимаем недостаточно в тех же базовых вопросах, — говорит Симмонс. — Люди хотят довести искусственный интеллект до ума, но, мне кажется, у них пока что нет необходимого понимания».
Автор фото, Netflix
Подпись к фото,Майли Сайрус исполняет роль певицы, у которой скопировали сознание
В одной из последних серий «Черного зеркала» Майли Сайрус исполняет роль певицы, у которой скопировали сознание, чтобы загрузить его в систему искусственного интеллекта с целью производства миниатюрных кукол-роботов «Эшли Ту» для подростков.
Многие эксперты считают, что подобный сюжет навсегда останется уделом научной фантастики.
«Мне кажется, закачивание сознания в робота невозможно. Нам еще далеко от способности моделирования человеческого мозга», — сказал Симмонс.
Однако, по мнению Герцеля, когда Никола Тесла заговорил о роботах в 1920-х годах, ему никто не верил, но сейчас они существуют.
«Будут происходить вещи, которые не может представить человеческий разум».
Создана искусственная нервная система с сознательными реакциями
Учёные создали искусственную нервную систему, которая обучается двигательным навыкам «сознательно», как человек. Разработка поможет в создании «умных» роботов и протезов.
У нас есть много способов реагировать на стимулы окружающего мира. Простейший из них – это безусловный рефлекс. Например, коснувшись горячего предмета, мы тут же отдёргиваем руку, причём даже до того, как почувствуем боль и тем более до того, как поймём, что случилось. Это бессознательная реакция, которой не нужно учиться.
Но есть бессознательные реакции, которые формируются в процессе обучения. При этом человек не прилагает к обучению сознательных усилий и вообще не замечает, что чему-то учится. А после обучения он не может противостоять наработанным реакциям.
Например, пусть Василий Пупкин часто обедает в столовой и обычно не бывает там по другим поводам. Тогда при входе в столовую у него будет вырабатываться слюна, даже если в этот раз он зашёл забрать забытый зонтик. Это наработанный условный рефлекс: нервная система усвоила, что столовая – значит, еда, и отдаёт команду вырабатывать слюну независимо от того, что сам Пупкин думает по этому поводу.
Бывают умения другого типа, например, навык ловить летящий на нас мяч. Человек предпринимает сознательные усилия, чтобы научиться этому, и может реагировать на советы типа «держи руки шире». Он понимает, что ловит мяч, и может не делать этого, если не хочет. Поэтому реакция такого типа называется сознательной.
Впрочем, спортсмен едва ли в силах детально описать все движения, которые необходимы, чтобы поймать мяч. И уж точно он не обдумывает каждое из них в отдельности, находясь на баскетбольной площадке. Поэтому термин «сознательная реакция» не стоит понимать слишком буквально. Тем более что ловить мяч могут обучиться и животные, обладающие лишь зачатками сознания.
Тем не менее по этой классификации многие наши двигательные навыки относятся именно к сознательным реакциям. Среди них, например, умение ездить на велосипеде, водить машину или застёгивать пуговицы.
Схема работы робота имитирует функционирование нервной системы человека. Перевод Вести.Ru.
Именно реакциям такого типа обучается новый робот, созданный учёными из Южной Кореи. Он ловит мяч (реакция) в ответ на вспышку света (стимул).
Схема в общих чертах имитирует работу нервной системы человека при выработке двигательных реакций. Фотоэлемент «видит» вспышку света, преобразуя световые волны в электрический сигнал. В этом смысле он имитирует сетчатку человеческого глаза. Далее этот сигнал передаётся в систему из искусственных нейронов, которая управляет роботизированной рукой.
Одновременно со вспышкой света на роботизированную руку сверху падает мяч. Задача системы – научиться, увидев вспышку, сжимать «ладонь» как раз вовремя, чтобы поймать снаряд.
На ранних стадиях эксперимента робот ещё не умел этого делать. На «принятие решения» поймать мяч уходило 2,56 секунды. За это время тот успевал удариться о манипулятор и отскочить от него. Однако после обучения время реакции сократилось до 0,23 секунды. Это сделало робота достаточно проворным, чтобы справляться с заданием.
Разумеется, машина, освоившая такого рода «сознательные реакции», не обладает сознанием. Но от неё этого и не требуется. Исследователи ставят себе куда более скромные задачи: создать более совершенных роботов, а также «умные» протезы для лиц с парализованными или ампутированными конечностями, которым многие привычные здоровому человеку повседневные действия даются с большим трудом или вообще недоступны.
Отметим, что самообучающиеся роботы, манипулирующие предметами – это не новость. Но обычно их «мозг» (точнее, искусственная нейронная сеть) реализуется в виде программы на обычном компьютере. В этот раз исследователи создали искусственные нейроны «в железе».
Исторически такой подход тоже не нов. Собственно, разработка искусственных нейронных сетей и началась ещё в 1950-х годах с конструирования тёплых ламповых нейронов (в буквальном смысле). Но он применяется редко, и его возможности всё ещё недостаточно изучены. К тому же технологии создания новых электронных компонентов постоянно совершенствуются и открывают путь новым поколениям искусственных нейронов. Например, в «компонентах мозга» нового устройства использован графен, который был изобретён не так уж давно.
Научная статья с результатами исследования была опубликована в журнале Science Advances.
К слову, ранее мы рассказывали о роботе, в некотором смысле осознающем себя.
Больше новостей из мира науки вы найдёте в разделе «Наука» на медиаплатформе «Смотрим».
Взгляд робота может влиять на поведение человека — исследование
Если вы знаете, что за вами кто-то наблюдает, трудно притвориться, что ничего не происходит. Согласитесь, очень непросто абстрагироваться и сохранять прежнюю концентрацию, чувствуя на себе чей-то взгляд.
Как ни странно, даже не имеет значения, кто является зрителем — живой человек или робот.
Недавно ученые провели эксперимент, в ходе которого людям предложили играть с роботом Если он смотрел на людей во время сеанса, это влияло на их поведение и стратегию в игре — такое изменение было зафиксировано при измерении нейронной активности мозга с помощью электроэнцефалографии (ЭЭГ).
«Если робот смотрит на вас в тот момент, когда нужно принять решение о следующем шаге, вам становится труднее это сделать, — говорит когнитивный нейробиолог Агнешка Виковска из Итальянского технологического института. — Более того, ваш мозг будет совершать усилия, требующие больших энергозатрат, чтобы попытаться «игнорировать» этот взгляд робота».
В ходе эксперимента 40 участников играли с роботом-гуманоидом iCub в «Цыпленка» — игру, в которой две виртуальные машины несутся навстречу друг другу.
Непосредственно перед моментом удара игра приостанавливалась, и участников просили взглянуть на робота, который либо встречался с ними взглядом, либо отводил глаза. В этот момент участники должны были решить, продолжить движение или уклониться.
Результаты эксперимента показали, что ответный взгляд робота не повлиял на выбор людей, однако немного увеличивал время, которое требовалось для принятия решения. И наоборот, когда iCub отводил взгляд, участники действовали быстрее.
Фото в тексте: iCub (IIT)
«В соответствии с нашей гипотезой замедленная реакция внутри субъектов после взгляда друг на друга может свидетельствовать о том, что этот фактор является причиной более высоких когнитивных усилий, например, в связи с появлением большего количества мыслей о выборе iCub или более высокой степенью подавления (потенциально отвлекающего) сигнала взгляда, который не имеет отношения к задаче», — поясняют ученые в своей статье.
По словам исследователей, это изменение в поведении игрока соответствовало изменению нейронной активности, называемой синхронизированной альфа-активностью — паттерном мозговых волн, который ранее связывался с подавлением внимания.
Более того, в ходе эксперимента было также выявлено, что когда робот не смотрел на участника, человеку было проще отвлечься от социального взаимодействия с iCub, сосредоточиться на игре и меньше отвлекаться.
Учитывая, что iCub — это робот-гуманоид, созданный для имитации формы и внешнего вида людей, не удивительно, что его взгляд может запускать наши обычные процессы, относящиеся к вниманию.
Результаты эксперимента могут быть использованы при разработке более продвинутых и интерактивных роботов в будущем, говорят исследователи.
«Степень присутствия роботов в нашей повседневной жизни будет только увеличиваться, — считает Виковска. — Вот почему важно понимать не только технологические аспекты конструкции роботов, но и человеческую сторону взаимодействия человека с роботом… как человеческий мозг обрабатывает поведенческие сигналы, передаваемые роботами».
Результаты исследования опубликованы в журнале Science Robotics.
Источник.
Фото на обложке: iCub (IIT)границ | Reachy, напечатанная на 3D-принтере роботизированная рука, похожая на человека, в качестве испытательного стенда для стратегий управления человеком и роботом
1. Введение
В то время как роботизированные системы продолжают улучшаться с точки зрения двигательных способностей благодаря прогрессу в мехатронике, разработка стратегий управления и интерфейсов, позволяющих человеку использовать весь потенциал усовершенствованной роботизированной руки, оказывается ключевой задачей в области робототехники гуманоидов и, в частности, , реабилитационная техника. Действительно, опросы и обзоры пользователей (Biddiss and Chau, 2007; Cordella et al., 2016) уже показали, что основными причинами отказа от протезирования верхних конечностей были недостаточная функциональность и необходимость длительного и сложного обучения. В качестве примеров взяты из самых передовых устройств, представленных в настоящее время на рынке протезов, руки Michelangelo (Ottobock) и i-limb Quantum (Touch Bionics) включают слишком много исполнительных механизмов, чтобы человек с ампутированной конечностью мог управлять ими независимо, и их управление во многом зависит от предварительной подготовки. -программируемые схемы захвата. Даже в случае здорового человека разрыв между сложностью роботизированных устройств и доступными командными сигналами подчеркивает необходимость эффективных и удобных интерфейсов и стратегий управления.
Чтобы восполнить этот пробел, исследователи исследовали методы получения дополнительных входных данных от человека. Одним из таких решений является метод объединения датчиков, который предполагает объединение измерений нескольких датчиков, работающих одновременно. Этот подход может использоваться с различными устройствами и модальностями зондирования (Novak and Riener, 2015), будь то визуальные, кинематические или физиологические. В частности, поскольку распознавание объектов из эгоцентрических видеороликов может помочь улавливанию действий при нейропротезах (de San Roman et al., 2017), в недавних работах исследовалось, как роботизированной системой можно управлять путем объединения отслеживания взгляда с ЭМГ (Corbett et al., 2013, 2014; Markovic et al., 2015; Gigli et al., 2017) или электроэнцефалографии (ЭЭГ). сигналов (McMullen et al., 2014; Wang et al., 2015). В других работах также исследовалось, как можно использовать дополненную реальность (AR) для обеспечения соответствующей визуальной обратной связи о состоянии роботизированной руки (Markovic et al., 2014, 2017) с целью улучшения контура управления.
Другой подход к преодолению этого ограничения — снизить потребность в командных сигналах, заставив роботизированную систему взять на себя часть своей собственной сложности.Таким образом, разрабатываются методы, позволяющие человеку управлять роботом с помощью команд более высокого уровня, связанных с задачей, вместо того, чтобы управлять роботом непосредственно в пространстве исполнительных механизмов. Распространенной реализацией этого подхода является выполнение управления конечной точкой через обратную кинематику (IK), которая преобразует командные сигналы из трехмерного рабочего пространства в пространство исполнительного механизма. Решение IK — ключевая тема исследований во всей области робототехники, включая автономную гуманоидную робототехнику (Bae et al., 2015; Rakita et al., 2018), но также может использоваться для управления кинематической избыточностью роботов, управляемых человеком (Zucker et al., 2015; Rakita et al., 2017; Meeker et al., 2018).
Для оценки эффективности методов управления уже более десяти лет используется виртуальная реальность (VR) (Hauschild et al., 2007; Kaliki et al., 2013; Phelan et al., 2015; Blana et al., 2016). ). В последнее время этот подход также извлекает выгоду из растущей доступности на рынке наборов для разработки VR, например Oculus (Facebook Technologies, LLC) и VIVE (HTC Corporation), что упрощает для исследователей интеграцию виртуальной тестовой среды в их экспериментальную установку.Однако роботизированная система, смоделированная в виртуальной среде, не будет вести себя так же, как физическое устройство, по своей природе подверженное механическим ограничениям и недостаткам. В самом деле, VR-установки обычно реализуют упрощенное устройство (например, идеальные приводы без трения) в упрощенном контексте (например, игнорируя гравитацию). В результате выводы, сделанные на основе оценок, выполненных в виртуальной тестовой среде, могут быть неприменимы напрямую к реальному роботу.
С другой стороны, некоторые исследователи используют настоящие роботизированные руки, чтобы получить более реалистичные данные на этапе тестирования.В литературных работах используются как коммерчески доступные устройства (Rakita et al., 2017; Meeker et al., 2018), так и системы-прототипы (McMullen et al., 2014; Bae et al., 2015). В частности, в области протезирования многие устройства с несколькими степенями свободы были разработаны как экспериментальные прототипы, такие как рука UNB (Losier et al., 2011), рука Йеля (Belter and Dollar, 2013) и SmartHand ( Cipriani et al., 2011).
Среди таких исследовательских устройств были разработаны Dawson et al.(2014) и Krausz et al. (2016) были разработаны с целью быть недорогими и легкодоступными для других исследователей как системы с открытым исходным кодом, включая детали, напечатанные на 3D-принтере. Действительно, поскольку 3D-печать позволяет изготавливать сложные и нестандартные формы небольшими партиями с низкими затратами, этот производственный метод полезен при разработке продуктов на стадии прототипа. Кроме того, тот факт, что одни и те же детали могут изготавливаться на многих различных 3D-принтерах, в значительной степени способствует совместному использованию этих конструкций.
В этой статье мы представляем Reachy, тестовую платформу в натуральную величину, которая будет использоваться исследователями для изучения, разработки и тестирования стратегий управления и интерфейсов для управляемой человеком робототехники. Опираясь на технические решения, взятые из аналогичных работ, мы стремились разработать робота, который был бы доступным на , доступным для совместного использования и « взламываемым » по сравнению с высококлассными прототипами или коммерчески доступными роботизированными манипуляторами; но также более человекоподобных , чем роботов промышленного уровня. Действительно, Reachy выигрывает от близости к человеческой руке с точки зрения размера и формы, а также двигательных функций и строения суставов.Кроме того, несмотря на то, что варианты использования не ограничиваются этой областью, эта роботизированная платформа в первую очередь предназначена для применения в протезировании и реабилитационной инженерии.
2. Дизайн роботов
2.1. Принципы дизайна
Reachy был создан с целью предоставить исследователям роботизированную платформу для тестирования интерфейсов управления и стратегий, которые будут использоваться для управления роботизированной рукой. Чтобы робот стал актуальным инструментом в области реабилитационных технологий, в его конструкции делается упор на человеческое сходство.Действительно, Ричи предназначен для имитации поведения верхней конечности человека в натуральную величину, при этом он фиксируется на уровне плеч на неподвижной опоре.
Кроме того, еще одним важным требованием к конструкции Reachy было обеспечение того, чтобы робот был пригоден для множества применений, начиная от нейропротезов и заканчивая дистанционно управляемыми манипуляторами. Таким образом, чтобы Reachy была универсальной платформой, мы намеревались сделать ее широко настраиваемой, а также легко и широко подключаемой. Обеспечение обширной экспериментальной воспроизводимости в этом контексте требует, чтобы платформа позволяла проводить тщательные модификации оборудования, а также делиться упомянутыми модификациями в научном сообществе.Поэтому мы решили разработать дизайн Reachy на следующих принципах и технических решениях: напечатаны на 3D-принтере пластмассовых каркасных деталей; стандартные приводы , механические компоненты и электроника; бесплатно и с открытым исходным кодом, совместно использующие программных и аппаратных ресурсов.
Reachy был разработан создателями проекта Poppy (Lapeyre et al., 2014), семейства роботов для исследований, искусства и образования, которые полагаются на общую архитектуру программного и аппаратного обеспечения, но отображают различные формы, функции и цели. .В частности, первый робот этого семейства, Poppy Humanoid, был первоначально разработан для исследования роли морфологии в двуногом передвижении (Lapeyre et al., 2013), что вызвало необходимость в платформе, части которой можно было бы легко перепроектировать, а затем произвести. собран. Вышеупомянутые принципы дизайна напрямую вытекают из философии и технических решений, которые лежали в основе разработки Poppy.
2.2. Оборудование
Reachy изначально разрабатывался как «полноразмерная» рука, то есть прототип, состоящий из трех сегментов верхней конечности человека от плеча до кисти.В этой «стандартной» версии Reachy весит 1,4 кг и имеет размеры 60 см от плеча до запястья, с размерами и пропорциями, аналогичными правой руке взрослого человека. Эти прототипы были оснащены и протестированы с различными конечными эффекторами (см. Рис. 1B): базовой сферой, антропоморфной рукой без суставов или двухзубым зажимом, обеспечивающим минимальную захватывающую способность. Кроме того, поскольку робот предназначен для настройки и «взлома», пользователи Reachy могут адаптировать его дистальный конец к существующей роботизированной руке, выбранной среди доступных исследовательских прототипов (Losier et al., 2011; Белтер и Доллар, 2013; Krausz et al., 2016). Например, новый прототип с изображением руки Брунеля (OpenBionics) в качестве рабочего органа был разработан с целью расширения функций и возможностей робота.
Рисунок 1 . Reachy в стандартной версии. (A) Архитектурная схема, описывающая программный стек, от высокоуровневого программного интерфейса до двигателей. Пунктирными линиями обозначены оси вращения шарниров. (B) Доступные в настоящее время конечные эффекторы.Сверху вниз: сферический, конический, ручной и шарнирный зажим.
В стандартной версии робот состоит из семи независимых степеней свободы, каждая из которых приводится в действие отдельным двигателем. Первые три мотора управляют плечево-лопаточно-плечевым суставом упрощенным способом, выполняя три последовательных вращения: сгибание-разгибание плеча, отведение-приведение плеча и латерально-медиальное вращение плечевой кости. Оси вращения трех двигателей пересекаются в одной точке, расположенной в центре вала второго двигателя (см. Рисунок 1A).Узел заплечика также содержит два роликовых подшипника для облегчения работы первого и третьего степеней свободы. Чтобы робот оставался достаточно простым для моделирования и сборки, эта сборка не воспроизводит систему взаимозависимых вращений и перемещений, образующих суставно-лопаточно-плечевой комплекс, но все же допускает широкий диапазон движений. Четвертый и пятый двигатели приводят в действие соответственно сгибание-разгибание в локтевом суставе и пронацию-супинацию предплечья, причем последний установлен на шарикоподшипнике.Наконец, два последних двигателя управляют лучезапястным суставом, последовательно выполняя радиально-локтевое отклонение и сгибание-разгибание. Их соответствующие оси вращения ортогональны, но не пересекаются; вместо этого два двигателя связаны короткой деталью, соединяющей предплечье и рабочий орган. Этот интервал между осями вращения имеет некоторое сходство с интервалом, который разделяет оси суставов запястья человека, хотя он немного слишком велик из-за размера привода.
Мы решили использовать серводвигатели Robotis Dynamixel для приведения в действие семи степеней свободы Reachy.Эти двигатели представляют собой универсальные модули, обеспечивающие хороший компромисс между точностью, скоростью и надежностью с точки зрения механики, а также встроенные датчики, контролирующие угловую скорость и положение. Они также позволяют индивидуально настраивать внутренний пропорционально-интегрально-производный (ПИД) регулятор, максимальный крутящий момент и механическую податливость. Благодаря этим характеристикам серводвигатели Dynamixel обеспечивают высокий уровень модульности, в то же время обеспечивая богатое поведение двигателя. В этом отношении приводы этой серии обычно используются в области робототехники, включая гуманоидных роботов (Ha et al., 2011; Ly et al., 2011; Hild et al., 2012; Schwarz et al., 2013; Dawson et al., 2014). Помимо приводов, для сборки шарниров Reachy необходимо лишь несколько дополнительных механических компонентов, а именно: три вышеупомянутых подшипника и трансмиссионные колеса, которые нужно вставить на вал каждого серводвигателя. В частности, поскольку все эти приводы включают в себя индивидуальную коробку передач, сборка Reachy не требует дополнительных редукционных механизмов для совместного приведения в действие.
В стандартную версию Reachy входят три разные модели двигателей Dynamixel.Самый мощный из них — это MX-106, и он управляет самой проксимальной глубиной резкости робота, сгибанием-разгибанием плеча, в то время как оставшаяся глубина резкости плеча и локтевой сустав приводится в действие MX-64. Поскольку эти четыре шарнира выдерживают самые тяжелые нагрузки во время движения робота, соответствующие двигатели были выбраны соответственно. Суставы предплечья и запястья, которые не требуют такой большой мощности, приводятся в действие AX-18, который легче и меньше серводвигателей MX, так что распределение веса робота смещено в сторону проксимального конца.
Что касается скелета робота, то в конструкции конечностей используется решетчатая конструкция, позволяющая снизить вес и упростить сборку, обеспечивая легкий доступ к отверстиям для винтов. Эта открытая структура с низкой плотностью также улучшает теплоотвод двигателя благодаря более свободной циркуляции воздуха. Прототипы и текущие версии Reachy были напечатаны из полиамида или полимолочной кислоты (PLA), двух материалов, обычно используемых в индустрии аддитивного производства. Их низкая стоимость, доступность и совместимость с большинством настольных 3D-принтеров делают их идеальными для создания прототипов, а их долговечность и разрешение печати делают их подходящими для готовой продукции с высокими стандартами качества.
2.3. Электроника и программное обеспечение
ДвигателиReachy соединены друг с другом последовательно с помощью трехконтактных разъемов и питаются от пары блоков питания 12 В × 5 А общей мощностью 120 Вт. На одном конце серии адаптер USB позволяет для подключения к компьютеру. Затем робот управляется через последовательный порт с программным интерфейсом под названием Pypot, который обеспечивает связь с серводвигателями Dynamixel для управления роботом, например, отправка команд двигателя, получение данных со встроенных датчиков.Эта архитектура проиллюстрирована на рисунке 1A.
Разработанная в рамках проекта Poppy, эта программная база является общей для всего семейства роботов Poppy-Reachy на базе Dynamixel. Следуя подходу с открытым исходным кодом, Pypot был полностью написан на Python, чтобы обеспечить кроссплатформенное развертывание, поскольку этот язык совместим с большинством настольных операционных систем, а также с некоторыми встроенными системами для одноплатных компьютеров. Программирование на Python также обеспечивает быструю разработку, уделяя особое внимание удобочитаемости и лаконичности кода, чтобы разработчики могли эффективно создавать четкие программы, независимо от того, является ли их проект малым или большим.Кроме того, пользователи Reachy могут воспользоваться многочисленными библиотеками Python, предназначенными для научных вычислений и уже используемыми в научном сообществе. Это позволяет им сочетать функции Reachy с такими методами, как обработка сигналов или машинное обучение, без необходимости прибегать к другим языкам или программному обеспечению.
Хотя его природа с открытым исходным кодом предоставляет опытным программистам широкую свободу в работе с системой, Pypot также предназначен для доступа новичков. В частности, он обеспечивает высокоуровневые моторные команды над угловым положением суставов и механической податливостью, так что любой пользователь может запрограммировать траекторию и привести робота в движение с помощью всего нескольких строк кода (см. Дополнительный материал).Кроме того, пользователям Reachy предоставляются учебные пособия в форме записных книжек Jupyter (Kluyver et al., 2016), которые представляют собой интерактивную разработку, поддерживающую объединение исходного кода, форматированного текста, графиков и графических виджетов ввода / вывода. Блокноты Jupyter могут быть созданы с помощью веб-навигатора и не требуют специального редактора кода. В результате эта программная среда достаточно доступна, чтобы позволить использовать роботов Poppy в качестве образовательных платформ в нескольких средних и старших школах.
Pypot также включает функции для управления виртуальным роботом в симуляторе V-REP (Freese, 2015), как показано на рисунке 2.Таким образом, пользователи могут экспериментировать и проверять свои разработки на смоделированном Reachy перед их развертыванием на реальном роботе в физической установке. Переход от моделируемого робота к реальному и наоборот не требует каких-либо изменений исходного кода, кроме одного ключевого слова при настройке соединения с роботом.
Рисунок 2 . Настоящий робот Reachy (A) и его смоделированный аналог (B) , сидящие в той же позе.
2.4. Характеристики
2.4.1. Характеристики двигателя
ДвигателиReachy могут поддерживать до 10 минут непрерывной работы и могут работать в течение целого дня при выполнении коротких, разряженных движений, чередующихся с короткими периодами отдыха. Они обеспечивают полезную нагрузку около 500 г на уровне конечной точки, с которой робот может справиться в течение нескольких минут. Их встроенные датчики нагрузки и температуры также позволяют автоматически запускать фазы покоя, чтобы предотвратить перегрев во время длительной работы или после того, как робот подвергается значительной нагрузке.В результате Reachy можно запрограммировать на автономную работу в течение продолжительных периодов времени, не подвергая приводы риску.
Без заряда двигатели Dynamixel могут развивать максимальную скорость 500 ° / с и максимальное ускорение 10 000 ° / с. 2 . Когда они работают в своем номинальном диапазоне угловых скоростей, их характеристики позволяют суставу робота достигать целевых позиций с задержкой от 50 до 100 мс. Такая отзывчивость, таким образом, позволяет разрабатывать схемы управления в реальном времени, в которых человек непрерывно управляет роботом.Как следствие, робот может безопасно перемещать свою конечную точку со скоростью до 2 м / с с ускорением 10 м / с 2 .
Благодаря трем степеням свободы на уровне плеч, полноразмерная версия Reachy может выполнять сложные движения и позы в широком диапазоне действий в трехмерном пространстве. В результате Reachy имеет рабочее пространство, аналогичное рабочему пространству руки взрослого человека, в пределах сферы радиусом 65 см с центром на его плече.
2.4.2. Применение в протезировании
Благодаря своей форме и суставам, напоминающим человеческий, Reachy подходит для применения в области инженерии реабилитации верхних конечностей в качестве испытательной платформы в натуральную величину.Действительно, Reachy может имитировать поведение протеза руки, чтобы протестировать и проверить схемы управления, прежде чем применять их на настоящем протезе. В этом контексте он также выигрывает в том, что он значительно дешевле, чем большинство имеющихся в продаже протезов верхних конечностей, благодаря своей аппаратной архитектуре.
Действительно, технология 3D-печати уже использовалась для создания многочисленных прототипов протезов руки, конструкции которых разрабатываются разработчиками, начиная от энтузиастов и любителей DIY до исследователей и инженеров, как подробно описано в статье 10 Kate et al.(2017). Тот факт, что проекты более половины этих устройств, напечатанных на 3D-принтере, размещены в Интернете и доступны бесплатно, показывает, как эти создатели используют преимущества взаимодействия большинства настольных принтеров. В этом обзоре также подчеркивается, что стоимость производства этих устройств является одним из решающих аспектов, вызвавших рост этой категории протезных устройств, настолько, что некоторые напечатанные на 3D-принтере протезы недавно вышли из стадии прототипа и вышли на рынок. такие как Hero Arm (OpenBionics).
По сравнению с устройствами, перечисленными в этом обзоре, Reachy является одной из немногих моделей, предназначенных для решения проблемы ампутации выше локтя. Кроме того, несмотря на то, что преобладание трансрадиальных ампутаций среди нарушений верхних конечностей объясняет редкость этого типа протезов, Reachy предназначен для проведения исследований на нескольких уровнях ампутации. Действительно, робот может использоваться в качестве макета устройства для любого уровня ампутации верхней конечности при обучении пациента мышечной активности перед установкой миоэлектрического протеза.Это позволяет пациенту начать тренировку еще до того, как он сможет надеть протез, например, пока культя все еще рубится. Очевидно, что такая тренировка не может заменить опыт работы с реальным протезом, особенно из-за различий с точки зрения точки зрения, воплощения и восприятия веса и инерции. Тем не менее, это может происходить при реабилитации пациента в качестве дополнительной или предварительной тренировки с целью ознакомления с миоэлектрическим контролем, а также с реактивностью и точностью двигателей.
В этом контексте потерянные двигательные функции пациента имитируются соответствующими суставами Ричи, в то время как более проксимальные приводы робота фиксируются в заданной позе. Таким образом, пациент может практиковаться в выполнении соответствующих мышечных сокращений и получать соответствующую обратную связь от робота, который движется соответствующим образом, следуя заданной схеме управления протезом. В более продвинутой установке, эти двигатели могут даже отслеживать и воспроизводить остаточные движения конечностей пациента, а не блокировать их.Такая установка может оказаться полезной также для тестирования стратегий управления с использованием остаточного движения конечности в качестве входного сигнала для управления протезом (Kaliki et al., 2013; Merad et al., 2016).
Что касается конечного эффектора в отношении захвата протезом руки, фиксированное запястье часто требует от пациента выполнения дополнительных движений плечом и локтем, чтобы компенсировать недостаточную подвижность дистального отдела. Таким образом, включение движения запястья оказывается весьма полезным для пациента (Kanitz et al., 2018), поскольку оно обеспечивает более естественное и удобное использование.Таким образом, запястье Reachy с 2 степенями свободы делает его подходящим для решения этого аспекта управления протезом. В сочетании с вращением предплечья эти двигательные функции на уровне запястья позволяют роботу устанавливать свою конечную точку в самых разных трехмерных ориентациях, обеспечивая различные типы захвата в зависимости от интересующего предмета.
Наконец, настраиваемая архитектура Reachy позволяет пользователям проектировать, печатать и собирать индивидуальные крепления, так что часть робота может быть установлена на настоящем протезном гнезде или ремне безопасности и носить ее с ампутированными конечностями (см. Рисунок 3).Будь то трансрадиальный или трансгумеральный уровень, части скелета робота могут быть изменены таким образом, чтобы его размеры соответствовали морфологии пользователя, чтобы лучше соответствовать анатомии культи, а также пропорциям здоровой конечности. Очевидно, что Reachy не предназначен для замены протеза для повседневного использования, но версия Reachy, устанавливаемая на розетку, также может быть использована для обучения пациентов с миоэлектрическим контролем.
Рисунок 3 . Виртуальная иллюстрация возможной эволюции Reachy: версия с креплением на розетку, которую носит чрез плечевой человек с ампутированной конечностью.
2,5. Сравнение с существующими роботизированными манипуляторами
Чтобы сравнить характеристики и возможности Reachy с существующими роботизированными устройствами, мы сравнили его с несколькими родственными роботизированными манипуляторами, рассматривая различные аспекты и особенности.
Рука Бенто (Доусон и др., 2014) — роботизированная рука, используемая в исследованиях и реабилитации верхних конечностей для имитации миоэлектрического протеза. Он включает пять суставов от плечевой кости до конечного эффектора, каждый из которых приводится в действие двигателем Dynamixel.Его механическая структура повторяет человеческие формы и пропорции и в основном основана на пластиковых деталях, напечатанных на 3D-принтере. В этом смысле этот робот очень похож на Ричи, хотя верхняя часть руки включает только одну глубину резкости на уровне плечевой кости и ни одной степени свободы на уровне плеча. Как следствие, его рабочее пространство ограничено круглой областью шириной 22 см с центром на изгибе, что обеспечивает грузоподъемность всего 300 г. Этот узкий диапазон движений и ограниченное срабатывание плеча делают Bento Arm непригодным для исследования движений всей руки, если он не установлен на гнезде протеза.В качестве реабилитационного устройства он нацелен на имитацию трансрадиального протеза, но не подходит для более высоких уровней ампутации. В частности, его нельзя использовать для изучения или воспроизведения координации между суставами плеча.
GummiArm (Stoelen et al., 2016) — экспериментальная роботизированная рука, созданная на основе биологических материалов, состоящая из 10 суставов, приводимых в движение сухожилиями и приводимых в действие 19 двигателями Dynamixel. Благодаря восьми суставам, обеспечивающим переменную жесткость, этот робот может выполнять движения в рабочем пространстве, аналогичном движению руки человека, при этом физически взаимодействовать с ним безопасно.Подобно Reachy, его части скелета, напечатанные на 3D-принтере, и подход с открытым исходным кодом позволяют пользователям копировать и изменять. Тем не менее, большее количество приводов и механика на основе сухожилий делают его более дорогим (более 5000 долларов в запасных частях, более 11500 долларов в комплекте), а также более подходящим для исследований биоиндуцированного срабатывания и совместимого управления двигателем, чем для реабилитации. инженерное дело. Действительно, большинство протезов плеча, локтя и предплечья приводится в действие одним двигателем на сустав, что не соответствует требованиям, вместо имитации биомеханических структур человека.
Модульный протез конечности (MPL) (Johannes et al., 2011) — экспериментальный роботизированный протез верхней конечности, состоящий из 26 суставов, приводимых в действие 17 двигателями. Его высококачественные компоненты и антропоморфный дизайн позволяют ему достигать человеческой силы в широком диапазоне движений, предлагаемых его суставами. По сравнению с Reachy, этот робот предлагает гораздо лучшие моторные характеристики, такие как грузоподъемность 15 кг и общая скорость 120 ° / с. Однако эти возможности также имеют более высокое энергопотребление (24 vs.5 В для Reachy) и больший вес (4,7 против 1,2 кг для Reachy).
DLR Hand Arm System (Grebenstein et al., 2011) — это экспериментальная роботизированная рука, созданная на основе биологических материалов, теперь интегрированная в гуманоидного робота Дэвида в качестве его верхней конечности. Он включает в себя шесть степеней свободы в руке и 19 в руке, приводимых в действие в общей сложности 52 двигателями. Его механическая структура с приводом от сухожилий позволяет роботу ловко работать со скоростью и в рабочем пространстве, сопоставимом с человеческим, что делает его явно более способным, чем Reachy, с точки зрения двигательных характеристик.Однако его двунаправленные соединения-антагонисты требуют множества двигателей и механических компонентов, специальной архитектуры передачи и плотной электронной сети, управляющей как срабатыванием, так и считыванием.
Из-за их цены и сложности с точки зрения электроники и механики эти передовые роботизированные устройства намного сложнее воспроизвести или детально настроить. В этом смысле их пользователи в значительной степени зависят от конструкторов и производителей роботов, которые собирают, модифицируют и ремонтируют его, в то время как дизайн Reachy позволяет пользователям обрабатывать каждый этап процесса изготовления.Его архитектура достаточно проста, чтобы позволить неспециалистам построить его и подключить к компьютеру. Что касается управления и взаимодействия, оба этих робота полагаются на сложные архитектуры управления (Bridges et al., 2011; Grebenstein et al., 2011), работающие в Simulink, проприетарном программном обеспечении, принадлежащем MathWorks, Inc. эти устройства менее открыты, и пользователю труднее модифицировать или адаптироваться к конкретному варианту использования. И наоборот, Reachy извлекает выгоду из своей программной архитектуры с открытым исходным кодом, обеспечивающей множество вариантов взаимодействия с различными командными сигналами и внешними программными инструментами.
Хотя Reachy не сравнится с этими продвинутыми роботами с точки зрения производительности, его возможность подключения и легко модифицируемая структура делают его подходящей платформой для исследований. В этом смысле мы хотим продвигать Reachy как законченную платформу, сочетающую в себе характеристики аппаратного и программного обеспечения, способствующие репликации, настройке и универсальности. Нам неизвестна подобная роботизированная система, которая предлагала бы столько возможностей, исходя из сравнения, подробно описанного в этом разделе.
2.6. Обмен философией
Reachy разработан в партнерстве с Pollen Robotics и распространяется как проект с полностью открытым исходным кодом. Кроме того, пользователи, желающие собрать робота самостоятельно, могут купить все оборудование в запасных частях по общей цене ниже 4000 долларов за стандартную версию. Любая лаборатория может создать свой собственный Reachy, модифицировать его компоненты и настроить его по своему желанию как с аппаратной, так и с программной стороны. Это позволяет исследователям адаптировать робота к своим конкретным потребностям и связывать его со своими собственными устройствами и инструментами.
Исходные файлы моделей автоматизированного проектирования (САПР) различных печатаемых частей совместно используются по лицензии Creative Commons BY-SA и доступны в Интернете. Список материалов и программных компонентов, относящихся к Reachy, распространяется на условиях Стандартной общественной лицензии ограниченного применения GNU и доступен онлайн в репозитории проекта. Библиотека Pypot распространяется под Стандартной общественной лицензией GNU и доступна онлайн в специальном репозитории.
Поскольку Reachy использует ту же программную и аппаратную архитектуру, что и роботы Poppy, стоит отметить, что его пользователи могут извлечь выгоду из помощи и вклада сообщества проекта Poppy в его репозиторий.Действительно, этот центр сообщества дает доступ ко многим советам, касающимся различных аспектов робота, от настройки и сборки серводвигателей до настройки программных инструментов и устранения неполадок.
3. Подтверждения концепции
Чтобы проиллюстрировать возможности взаимодействия Reachy, мы разработали несколько доказательств концепции, в которых функции робота объединяются или расширяются с помощью различных внешних устройств и программных инструментов. Все доказательства концепции, описанные ниже, были разработаны на Python, чтобы дополнительно продемонстрировать интерфейсный потенциал, предоставляемый этим языком.
3.1. Обратная кинематика для управления положением конечной точки
Определение набора углов двигателя, которые помещают конечную точку робота в целевую позицию в его рабочем пространстве, является распространенной проблемой в области роботизированных манипуляторов и обычно называется проблемой Inverse Kinematics (IK). Поскольку он включает семь независимых степеней свободы, Reachy обычно отображает кинематическую избыточность , подразумевая, что существует бесконечное количество различных решений этой проблемы для каждой достижимой целевой позиции.Таким образом, чтобы привести положение конечной точки робота к заданной цели, необходимо определить, какой набор углов применять среди бесконечного количества возможных наборов. Однако численное выражение этой геометрической задачи с недостаточными ограничениями является нелинейным, что делает аналитическое решение непрактичным и дорогостоящим с точки зрения вычислений.
3.1.1. Локальная оптимизация
Вместо этого широко распространенным методом, используемым робототехниками для решения проблем IK, является использование локальной оптимизации. Этот метод основан на функции стоимости, приписывающей скалярное значение любому набору углов для количественной оценки того, насколько это хорошее решение по отношению к проблеме IK: более низкая стоимость означает лучшее решение.Обычно эта функция стоимости основана на расстоянии между целью и положением конечной точки, которое может быть определено аналитически с помощью геометрической модели робота. Затем с помощью пошагового процесса оптимизация находит и возвращает локальный минимум этой функции стоимости, который должен соответствовать одному из наборов углов, помещающих конечную точку в требуемое положение.
Мы использовали библиотеку Python IKPy (Manceron, 2015), универсальный решатель IK, чтобы применить этот метод в Reachy.Ресурсы программного обеспечения робота включают файл универсального формата описания робота (URDF), описывающий механические свойства Reachy, такие как относительное положение и ориентация каждого сустава и части скелета. Затем эти геометрические данные могут быть импортированы с помощью IKPy для построения соответствующей кинематической цепочки путем прохождения последовательности соединений от основания робота до его конечной точки. Таким образом, это взаимодействие между IKPy и программным интерфейсом Reachy может быть выполнено прямо из коробки и работает как автономно, без каких-либо внешних устройств или специального оборудования.В результате объединение функций IKPy с параметрами команд двигателей обеспечивает новый и простой способ управления Reachy, отправляя трехмерные координаты в виде команд вместо углов сочленения. Пример кода, показывающий, как использовать IKPy с Reachy, доступен в Интернете.
IKPy позволяет задавать параметры процесса оптимизации (например, максимальное количество итераций, допуск сходимости) при его вызове из другой программы. Благодаря этим параметрам, доступным в коде, пользователи могут точно настроить процесс в соответствии с предполагаемым вариантом использования и доступной вычислительной мощностью.Например, после точной настройки нашей установки методом проб и ошибок модель смогла достичь субсантиметровой точности при времени вычисления менее 100 мс на настольном компьютере. Однако кинематическая цепь, используемая в этом методе, представляет собой теоретическую модель робота и не учитывает вес робота и механический люфт суставов. На физическом роботе, поскольку фактические двигатели не могут достичь точных угловых положений , определенных IKPy, конечная точка имеет тенденцию к недолету при использовании этого метода.Чтобы оценить точность конечной точки, расстояние между фактическим положением конечной точки и ее целью было измерено для восьмидесяти положений, распределенных в диапазоне действия робота; каждое измерение выполнялось после того, как робот двигался в течение 1,5 с, затем его просили удерживать позу в течение 3,5 с. Мы получили среднее расстояние до цели 87 мм (стандартное отклонение 23 мм), а также заметили, что конечная точка обычно достигает положений, расположенных под целью. Действительно, ошибки положения по двум декартовым горизонтальным осям примерно центрированы на нуле (среднее значение <5 мм), тогда как по вертикальной оси эта ошибка подвержена заметному смещению (среднее значение = 84 мм).
Тем не менее, этот недостаток не будет явно заметен, если никакой видимый объект не материализует целевую позицию в рабочем пространстве. Кроме того, вертикальное смещение оказывается довольно постоянным во времени и в доступном пространстве. Следовательно, в контексте непрерывного управления положением конечной точки с этим можно иметь дело во время фазы калибровки, выполняемой перед фазой управления. Таким образом, это взаимодействие между IKPy и Reachy может быть удобно использовано в приложениях, где нет большой потребности в точности конечных точек в рабочем пространстве.
Для оценки повторяемости роботу было поручено несколько раз выполнить одно и то же движение, в то время как положение конечной точки регистрировалось с помощью системы отслеживания движения (Optitrack V120 Trio, Natural Point Inc.). Во-первых, роботу была поставлена задача пройти во фронтальной плоскости круг шириной 40 см за 3,5 с. Сравнение записанных траекторий показало, что на ключевых кадрах, распределенных вдоль движения, для данного набора двигательных целей результирующие положения конечных точек робота были распределены в пределах сферы радиусом 12 мм.Затем роботу было поручено достичь заданного положения и удерживать его в течение нескольких секунд, прежде чем его конечная точка будет записана. После десяти повторений этого движения позиции были распределены внутри сферы радиусом 5 мм. Эти результаты иллюстрируют способность Ричи достигать одной и той же точки в пространстве в ответ на одни и те же моторные команды как в статическом, так и в динамическом контексте.
3.1.2. Обучение с учителем с помощью искусственной нейронной сети
С другой стороны, этот разрыв между теоретической моделью и фактическим функционированием Ричи может быть сокращен за счет использования методов моделирования, которые не предназначены для имитации идеального поведения робота .Один из них заключается в записи фактических движений, выполняемых роботом, и использовании их в качестве «реальных» примеров для выполнения контролируемого обучения. Цель состоит в том, чтобы создать набор движений, в котором синхронно записываются как углы двигателя, так и координаты конечной точки, чтобы алгоритм обучения с учителем мог имитировать фактическую взаимосвязь между этими двумя величинами.
Чтобы применить эту технику с Reachy, мы сначала определили набор положений робота посредством физической демонстрации: с его двигателями, установленными в соответствии с требованиями, робот был вручную помещен в различные конфигурации, в то время как встроенные датчики регистрировали углы суставов.Затем, на основе записанных углов, робот выполнял движения, переходя от одного из таких продемонстрированных положений к другому, в то время как Optitrack V120 записывал фактическое положение конечной точки. Мы использовали искусственную нейронную сеть (ИНС) для выполнения контролируемого обучения на захваченных данных соединения и конечных точек. ИНС — это вычислительные инструменты, основанные на элементарных логических единицах, называемых «нейронами», которые связаны между собой взвешенными связями, обычно следуя определенной сетевой архитектуре (Reed and Marks, 1998).В течение нескольких десятилетий эти инструменты использовались для выполнения контролируемого обучения путем настройки весов этих ссылок на основе данных обучения. В области робототехники ИНС обычно используются для измерения окружающей среды или эффекторного управления, включая решение ИК (Bouganis and Shanahan, 2010; Duka, 2014; Almusawi et al., 2016).
Наши результаты были получены с использованием многослойного персептрона с прямой связью, включающего два полностью связанных скрытых слоя из 64 и 128 нейронов соответственно.Мы использовали бэкэнд TensorFlow (Abadi et al., 2015) и Keras (Chollet, 2015), программный интерфейс Python для ИНС, чтобы реализовать и обучить эту сеть для выполнения решения IK, то есть: принимать координаты конечной точки в качестве входных данных и возвращать соответствующие углы сочленения на выходе.
По сравнению с использованием IKPy, реализация этого метода более требовательна и требует выполнения ранее описанного двухфазного процесса сбора данных с использованием оборудования захвата движения. Однако, поскольку этот метод основан на движениях, выполняемых физическим роботом, а не на механически совершенной модели, ИНС неявно учитывает отклонения между командами двигателя, отправляемыми роботу, и углами, фактически достигаемыми двигателями.В результате этот метод оказался более точным, чем метод локальной оптимизации с реальным роботом (среднее расстояние до цели = 25 мм, стандартное отклонение 11 мм). В частности, он не страдает от вышеупомянутого вертикального смещения, поскольку ошибка положения по вертикальной оси не более смещена от центра, чем по горизонтальным осям (в среднем <14 мм для всех трех осей). С другой стороны, время вычислений, необходимое для выполнения одного решения IK с помощью этого метода, неизменно оставалось менее 1 мс, что доказывает, что это намного быстрее, чем локальная оптимизация.
Кроме того, построение тренировочного набора посредством демонстрации поз вручную позволяет пользователям сознательно вносить предвзятость в пользу определенного типа позы. Таким образом, такая предвзятость будет неявно изучаться и эмулироваться сетью, поскольку ее выходные данные будут по замыслу аналогичны позам обучающей выборки. Например, если записываются только позы с горизонтальной рукой и ладонью, обращенными вниз, практически все углы суставов, возвращаемые сетью, должны соответствовать позам, отображающим ту же характеристику.
Что касается структуры сети, мы заметили, что добавление большего количества скрытых слоев или увеличение их размера не дает значительных преимуществ и даже может привести к переоснащению сети примерами, при этом заметно увеличивая время, необходимое для ее обучения. Основываясь на этих наблюдениях, мы предполагаем, что более сложные сетевые архитектуры, такие как сверточные или рекуррентные сети, могут не подходить для решения этой проблемы IK.
В заключение по теме решения ИК для Reachy мы представили здесь два метода с заметными различиями в точности, практичности или удобстве.Эти методы также демонстрируют, как Reachy выигрывает от возможности подключения и настройки, поскольку различные решения могут использоваться для предоставления аналогичных функций, чтобы пользователи могли выбрать решение, подходящее для их нужд. Для выполнения управления положением конечной точки можно использовать другие подходы, основанные либо на существующих методах из литературы, либо на разработанном ad hoc с более конкретными требованиями.
3.2. Дистанционное управление
На основе функции управления положением конечной точки, доступной с помощью этих методов решения IK, мы разработали второе доказательство концепции, которое мы называем «дистанционное управление».«Цель этого доказательства концепции — предоставить пользователям интуитивно понятный и прозрачный способ управления роботом в реальном времени, который не требует от них отправки явных количественных команд, таких как углы сочленений или координаты конечных точек. С этой целью дистанционный режим вождения работает, непрерывно отслеживая траекторию движения руки объекта и одновременно отображая ее на руке робота, считая ее конечной точкой.
Наша реализация этого режима вождения использует Optitrack V120 Trio в качестве системы отслеживания движения для определения трехмерного положения маркера, помещенного на руку.Мы связали устройство с программой Python с помощью OptiRX (Астанин, 2016) для получения данных маркеров в реальном времени с частотой 120 Гц. Перед фазой управления выполняется калибровка, чтобы установить связь между системой отсчета объекта, в которой выражены данные маркеров, и системой отсчета робота, в которой должны быть выражены координаты конечной точки. Затем руки робота и испытуемого принимают одинаковую исходную позу: плечевая кость вдоль тела, а локоть согнут на 90 ° (см. Рисунок 4).В этой позе положения рук объекта и робота сохраняются, чтобы работать как исходные точки в соответствующих кадрах. В каждый момент цикла управления с частотой 10 Гц первый используется для вычисления мгновенного вектора смещения руки испытуемого, а затем последний используется для вычисления целевого положения руки робота путем сопоставления этого вектора с рамкой робота. Наконец, используя метод решения IK, Reachy приводится в движение, так что его конечная точка направляется к этой мгновенной цели.
Рисунок 4 .Настройка дистанционного управления, показанная на этапе калибровки. Субъект и робот принимают одну и ту же позу, в то время как система Optitrack (слева) записывает координаты отражающего маркера, помещенного на руку субъекта. См. Этот режим вождения в действии на https://www.youtube.com/watch?v=Oa9mHMoDtYI.
В результате субъект может управлять роботом, выполняя естественные движения руками, наблюдая, как Ричи их отражает, и используя эту визуальную обратную связь для регулировки движения робота.Очевидно, время обработки, а также тот факт, что двигатели не могут мгновенно достичь целевых углов, отправленных в виде команд, вносят задержку между движением конечной точки и траекторией руки объекта. В текущих настройках эта задержка обычно составляет от 350 до 450 мс. Это доказательство концепции показывает, как можно реализовать стратегию управления с помощью Reachy, а именно: способ привести ее в действие на основе данных, полученных с внешних устройств. Он также демонстрирует, как можно управлять Reachy в режиме реального времени, выполняя плавные и устойчивые движения.
Видеоклип, показывающий, как субъект управляет роботом в дистанционном режиме, доступен в Интернете.
3.3. Контроль взгляда
Следуя за вспомогательными устройствами на основе зрения, мы разработали второе доказательство концепции, чтобы исследовать, как движения глаз и поведение взгляда могут быть использованы в качестве источника команд для приведения Ричи в движение. С этой целью мы попытались связать робота с инструментами отслеживания взгляда и обработки изображений, чтобы позволить субъекту управлять Ричи, двигая только глазами, а не конечностями.Отслеживание взгляда — это категория методов, нацеленных на измерение движений глаз или направления взгляда, будь то для целей наблюдения или в качестве входных данных в интерактивной установке (Duchowski, 2003). В области робототехники недавно были применены методы слежения за глазами для управления роботизированными руками, особенно с приложениями в реабилитации и вспомогательных технологиях (Frisoli et al., 2012; McMullen et al., 2014; Hortal et al., 2015).
Результирующая установка основана на камере, снимающей сцену перед роботом, и на экране компьютера, отображающем его видеопоток для объекта.Камера размещается так, чтобы сцена соответствовала доступному пространству робота, а объекты размером с ладонь различных цветов и форм располагались в пределах ее досягаемости. Они размещены так, чтобы не происходило визуального перекрытия с точки зрения камеры, и не возникало никаких физических препятствий, когда робот перемещал свою конечную точку к объекту. В этой настройке экран действует как двумерный прокси между рабочим пространством робота и полем обзора объекта, чтобы использовать технологию отслеживания взгляда в более простом контексте, чем трехмерное пространство.Мы использовали айтрекер GP3 HD (Gazepoint), чтобы определить местонахождение фокуса взгляда объекта на плоскости экрана и идентифицировать соответствующий объект в пространстве, в котором находится робот (см. Рисунок 5). Затем робот может быть приведен в движение к положению этого объекта, либо используя заранее записанные позы, либо комбинацию обратной кинематики и компьютерного зрения в сцене перед роботом.
Рисунок 5 . Настройка управления взглядом. Справа перед левосторонней версией Ричи расположены различные объекты, и полученная сцена снимается камерой, размещенной над плечом робота.Его видеопоток отображается на экране слева, под которым размещен айтрекер. Субъект носит повязку Myo на правом предплечье, чтобы робот запускал движение. См. Этот режим вождения в действии на https://www.youtube.com/watch?v=qloR67AaqQ4.
Наконец, используя повязку Myo (Thalmic Labs Inc.), мы также интегрировали в эту установку базовую форму миоэлектрического контроля. Это измерительное устройство позволяет обнаруживать определенный паттерн активации мышц, который можно интерпретировать как командный сигнал.Таким образом, субъект может, например, произвольно сокращать мышцы предплечья, чтобы вызвать движение робота. Каждый раз, когда обнаруживается такой сигнал, объект, на котором сфокусирован взгляд субъекта, идентифицируется системой слежения за глазами, и Ричи соответственно приводится в движение.
Стоит отметить, что обработка данных взгляда, выполняемая для идентификации интересующего объекта, остается очень простой в этой упрощенной настройке. В повседневной жизни поза субъекта будет неограниченной.Более того, среда, в которой субъект действует, выполняя свою инструментальную повседневную деятельность, загромождена. Отвлекающие факторы и смена сцены провоцируют саккады. При удерживании взгляда на целевом объекте геометрия в динамической сцене также нестабильна из-за микросаккад. Вот почему необходима фильтрация сигнала фиксации взгляда по времени (González-Díaz et al., 2019). Более того, сегодня локализация объектов в области, предсказываемой взглядом, может быть решена вместе с задачей распознавания объектов с использованием мощных глубоких классификаторов CNN.Это позволяет более точно локализовать объект, а также адаптироваться к динамике сцены из-за неограниченного движения объекта.
Исходный код, использованный в этом доказательстве концепции, доступен в Интернете. Видеоклип, показывающий, как объект выполняет управление взглядом, доступен в Интернете.
4. Заключение и перспективы
Reachy, роботизированная рука с семью степенями свободы, похожая на человека, была разработана в качестве испытательной платформы для исследований роботизированных рук, управляемых людьми. Следуя подходу с открытым исходным кодом, его дизайн был разработан, чтобы обеспечить легкий обмен и низкую стоимость изготовления, с целью обеспечения обширной настройки в широком спектре приложений.Программные и аппаратные ресурсы были доступны в Интернете, чтобы исследователи и непрофессионалы могли создать робота Reachy и интегрировать его в свои собственные эксперименты и проекты.
В краткосрочной перспективе непосредственные применения Reachy включают исследование, разработку и тестирование стратегий управления и интерфейсов для роботизированного оружия. Таким образом, было создано несколько прототипов и разработаны доказательства концепций, чтобы проиллюстрировать возможные варианты использования в различных областях, связанных с робототехникой, управляемой человеком.В качестве платформы с широким охватом он позволяет исследовать гибридные стратегии управления, комбинируя биомеханические сигналы с инструментами отслеживания движения или взгляда и методами компьютерного зрения (de San Roman et al., 2017; González-Díaz et al., 2019). Reachy также может помочь изучить, как стратегии контроля на основе зрения могут помочь в управлении реабилитационными устройствами, такими как вспомогательная рука, прикрепленная к инвалидному креслу, для использования пациентами с травмой спинного мозга (SCI) (Corbett et al., 2013, 2014).
В долгосрочной перспективе Reachy можно использовать в качестве макета устройства для исследований и тренировок с нейропротезами верхних конечностей.В частности, это может помочь пациентам познакомиться с производством мышечных сигналов и миоэлектрическим контролем до того, как им будет установлен настоящий протез руки. Кроме того, благодаря опциям управления двигателями Reachy подходит для лечения различных уровней ампутации, используя отдельные режимы управления для управления проксимальными и дистальными суставами. Например, как способ имитации чрескожной ампутации, Reachy можно контролировать с помощью «гибридного» режима телеоперации, в котором плечевые суставы воспроизводят реальное движение плеча пациента, в то время как другие двигатели управляются с помощью отдельной, искусственной стратегии управления.Подобные подходы были исследованы в недавних работах (Kaliki et al., 2013; Merad et al., 2016), где естественное движение плеча (выполняемое субъектом) используется для вывода искусственного движения локтя и / или запястья (выполняемого виртуальным аватаром). или носимый протез). В общем, Reachy может оказаться универсальным устройством, подходящим для приложений с несколькими подходами для управления нейропротезом верхней конечности.
Доступность данных
Все наборы данных, созданные для этого исследования, включены в рукопись и / или дополнительные файлы.
Авторские взносы
SM участвовал в разработке доказательств концепции под руководством P-YO и AR и написал статью. ML и PR разработали робота и участвовали в разработке доказательств концепции. CH участвовал в разработке доказательств концепции. JB-P, FP и DC предоставили входы для написания бумаги. Все авторы одобрили окончательную версию.
Финансирование
Эта работа финансировалась двумя грантами PEPS CNRS / IdEx Bordeaux (2014 и 2015) и грантом CNRS Osez l’interdisciplinarité (2017–2019).
Заявление о конфликте интересов
ML и PR связаны с Pollen Robotics, компанией, имеющей финансовые интересы в системе, представленной в этой работе, в качестве ее основного поставщика.
Остальные авторы заявляют, что исследование проводилось при отсутствии каких-либо коммерческих или финансовых отношений, которые могли бы быть истолкованы как потенциальный конфликт интересов.
Благодарности
Авторы хотели бы поблагодарить Лайонела Парра-Иглесиаса за разработку и печать деталей каркаса, Филиппа Шове за разработку и сборку опоры робота и Лукаса Дюре за создание рисунка 4.
Дополнительные материалы
Дополнительные материалы к этой статье можно найти в Интернете по адресу: https://www.frontiersin.org/articles/10.3389/fnbot.2019.00065/full#supplementary-material
Сноски
Список литературы
Abadi, M., Agarwal, A., Barham, P., Brevdo, E., Chen, Z., Citro, C., et al. (2015). TensorFlow: крупномасштабное машинное обучение в гетерогенных системах .
Google Scholar
Альмусави, А. Р., Дюльгер, Л. К., и Капуцу, С. (2016). Новый подход искусственной нейронной сети к решению обратной кинематики руки робота (Denso VP6242). Comput. Intell. Neurosci . 2016: 5720163. DOI: 10.1155 / 2016/5720163
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Астанин, С. (2016). Библиотека на чистом Python для получения данных захвата движения от движка потоковой передачи OptiTrack .
Google Scholar
Bae, J.-H., Park, J.-H., Oh, Y., Ким, Д., Чой, Ю., и Ян, В. (2015). Управление пространством задач с учетом жесткости пассивных мышц для избыточных роботизированных рук. Intell. Серв. Робот. 8, 93–104. DOI: 10.1007 / s11370-015-0165-2
CrossRef Полный текст | Google Scholar
Белтер, Дж. Т., и Доллар, А. М. (2013). «Новый дифференциальный механизм, позволяющий использовать две степени свободы на одном приводе: приложение к протезу руки», в Международная конференция IEEE 2013 г. по реабилитационной робототехнике (ICORR) (Сиэтл, Вашингтон, IEEE), 1–6.
Google Scholar
Биддисс, Э.А., и Чау, Т. Т. (2007). Использование и отказ от протезирования верхней конечности: исследование за последние 25 лет. Prosthet. Ортопедия. Int. 31, 236–257. DOI: 10.1080 / 03093640600994581
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Блана Д., Кириаку Т., Ламбрехт Дж. М. и Чедвик Э. К. (2016). Возможность использования комбинированных ЭМГ и кинематических сигналов для управления протезом: имитационное исследование в среде виртуальной реальности. J. Electromyogr. Кинезиол. 29, 21–27. DOI: 10.1016 / j.jelekin.2015.06.010
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Буганис, А., и Шанахан, М. (2010). «Обучение нейронной сети с пиковыми сигналами для управления роботизированной рукой с 4 степенями свободы на основе пластичности, зависящей от времени пиков», в Международной совместной конференции по нейронным сетям 2010 г. (IJCNN) (Барселона: IEEE), 1–8.
Google Scholar
Бриджес, М. М., Пара, М. П. и Машнер, М.J. (2011). Архитектура системы управления модульным протезом конечности. Johns Hopkins APL Techn. Дайджест 30, 217–222.
Google Scholar
Корбетт, Э. А., Кёрдинг, К. П., и Перро, Э. Дж. (2013). Оценка в реальном времени неинвазивного нейропротезного интерфейса для контроля досягаемости. IEEE Trans. Neural Syst. Rehabil. Англ. 21, 674–683. DOI: 10.1109 / TNSRE.2013.2251664
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Корбетт, Э.А., Сакс, Н. А., Кёрдинг, К. П., и Перро, Э. Дж. (2014). Мультимодальное декодирование и согласованная сенсорная информация повышают эффективность работы субъектов с травмой шейного отдела спинного мозга. Фронт. Neurosci. 8: 123. DOI: 10.3389 / fnins.2014.00123
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Cordella, F., Ciancio, A. L., Sacchetti, R., Davalli, A., Cutti, A. G., Guglielmelli, E., et al. (2016). Обзор литературы о потребностях пользователей протезами верхней конечности. Фронт. Neurosci. 10: 209. DOI: 10.3389 / fnins.2016.00209
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Доусон, М. Р., Шерстан, К., Кэри, Дж. П., Хеберт, Дж. С., и Пиларски, П. М. (2014). Разработка Bento Arm: усовершенствованная роботизированная рука для миоэлектрических тренировок и исследований. Proc. MEC 14, 60–64. DOI: 10.13140 / 2.1.3118.4640
CrossRef Полный текст | Google Scholar
de San Roman, P. P., Benois-Pineau, J., Доменджер, Ж.-П., Паклет, Ф., Каттаерт, Д., и де Руги, А. (2017). Распознавание объектов на основе эгоцентрических роликов с глубоким CNN: к применению при нейропротезах. Comput. Vis. Понимание изображений. 164, 82–91. DOI: 10.1016 / j.cviu.2017.03.001
CrossRef Полный текст | Google Scholar
Духовский, А. Т. (2003). Методология отслеживания взгляда: теория и практика . Лондон, Великобритания: Springer.
Google Scholar
Дука, А.-V. (2014). Решение обратной кинематики на основе нейронной сети для отслеживания траектории робота-манипулятора. Proc. Technol. 12, 20–27. DOI: 10.1016 / j.protcy.2013.12.451
CrossRef Полный текст | Google Scholar
Фриз, М. А. (2015). Платформа для экспериментов с виртуальными роботами . Цюрих: Coppelia Robotics.
Google Scholar
Frisoli, A., Loconsole, C., Leonardis, D., Banno, F., Barsotti, M., Chisari, C., et al. (2012). Новое управление экзоскелетом верхней конечности, управляемое взглядом, для реабилитации в реальных задачах. IEEE Trans. Syst. Человек Киберн. Часть C 42, 1169–1179. DOI: 10.1109 / TSMCC.2012.2226444
CrossRef Полный текст | Google Scholar
Джильи А., Гийсбертс А., Грегори В., Коннолато М., Ацори М. и Капуто Б. (2017). Визуальные подсказки для улучшения миоэлектрического контроля протезов верхних конечностей. arXiv [Препринт]. arXiv: 1709.02236 . DOI: 10.1109 / BIOROB.2018.8487923
CrossRef Полный текст | Google Scholar
Гонсалес-Диас, И., Бенуа-Пино, Х., Доменджер, Ж.-П., Каттаерт, Д., и де Руги, А. (2019). Управляемые восприятием глубокие нейронные сети для прогнозирования действий эго: захват объекта. Распознавание образов. 88, 223–235. DOI: 10.1016 / j.patcog.2018.11.013
CrossRef Полный текст | Google Scholar
Гребенштейн, М., Альбу-Шеффер, А., Бальс, Т., Шалон, М., Эйбергер, О., Фридл, В. и др. (2011). «Система руки DLR», Международная конференция IEEE по робототехнике и автоматизации, 2011 г. (Шанхай: IEEE), 3175–3182.
Google Scholar
Ха И., Тамура Ю., Асама Х., Хан Дж. И Хонг Д. В. (2011). «Разработка открытой гуманоидной платформы DARwIn-OP», , 2011 г., Материалы Ежегодной конференции SICE (SICE) (Токио: IEEE), 2178–2181.
Google Scholar
Хаушильд М., Давуди Р. и Лоеб Г. Э. (2007). Среда виртуальной реальности для проектирования и подгонки нервных протезов. IEEE Trans. Neural Syst. Rehabil. Англ. 15, 9–15. DOI: 10.1109 / TNSRE.2007.891369
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Хильд, М., Зидель, Т., Бенкендорф, К., Тиле, К., и Шпрангер, М. (2012). «Мион, новый гуманоид», в Language Grounding in Robots , ред. Л. Стилс и М. Хилд (Нью-Йорк, Нью-Йорк: Спрингер), 25–44.
Google Scholar
Хортал, Э., Яньес, Э., Убеда, А., Перес-Видаль, К., и Азорин, Дж. М. (2015). Сочетание интерфейса мозг-машина и интерфейса электроокулографии для выполнения задач по подбору и размещению с помощью роботизированной руки. Робот. Auton. Syst. 72, 181–188. DOI: 10.1016 / j.robot.2015.05.010
CrossRef Полный текст | Google Scholar
Йоханнес, М.С., Бигелоу, Дж. Д., Берк, Дж. М., Харшбаргер, С. Д., Козловски, М. В., и Ван Дорен, Т. (2011). Обзор процесса разработки модульного протеза конечности. Johns Hopkins APL Techn. Дайджест 30, 207–216.
Google Scholar
Калики Р. Р., Давуди Р. и Лоеб Г. Э. (2013). Оценка неинвазивной схемы команд для протезов верхних конечностей в виртуальной реальности. IEEE Trans. Биомед. Англ. 60, 792–802. DOI: 10.1109 / TBME.2012.2185494
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Каниц, Г., Монтаньяни, Ф., Контроцци, М., и Чиприани, К. (2018). Податливые протезы запястья более естественны, чем жесткие запястья при дотягивании, а не (обязательно) во время манипуляции. IEEE Trans. Neural Syst. Rehabil. Англ. 26, 1407–1413. DOI: 10.1109 / TNSRE.2018.2847565
CrossRef Полный текст | Google Scholar
Клюйвер, Т., Ragan-Kelley, B., Pérez, F., Granger, B.E., Bussonnier, M., Frederic, J., et al. (2016). «Блокноты Jupyter — формат публикации для воспроизводимых вычислительных рабочих процессов», в Positioning and Power in Academic Publishing: Players, Agents and Agendas , ред. Л. Фернандо и С. Биргит (Геттинген: IOS Press), 87–90.
Google Scholar
Краус, Н. Э., Роррер, Р. А., и Вейр, Р. Ф. (2016). Разработка и изготовление руки с открытым исходным кодом с шестью степенями свободы. IEEE Trans.Neural Syst. Rehabil. Англ. 24, 562–572. DOI: 10.1109 / TNSRE.2015.2440177
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Lapeyre, M., Rouanet, P., Grizou, J., Nguyen, S., Depraetre, F., Le Falher, A., and Oudeyer, P.-Y. (2014). «Проект Poppy: изготовление с открытым исходным кодом трехмерного напечатанного робота-гуманоида для науки, образования и искусства», в Digital Intelligence 2014 (Нант), 6.
Google Scholar
Лапейр, М., Руане, П., и Аудейер, П.-Y. (2013). «Маковая гуманоидная платформа: экспериментальная оценка роли био-формы бедра», , 2013, 13-я Международная конференция IEEE-RAS по роботам-гуманоидам (гуманоиды), (Атланта, Джорджия: IEEE), 376–383.
Google Scholar
Losier, Y., Clawson, A., Wilson, A., Scheme, E., Englehart, K., Kyberd, P., et al. (2011). «Обзор системы рук UNB», , представленный на симпозиуме по миоэлектрическому контролю (Фредериктон, Северная Каролина).
Google Scholar
Ly, O., Lapeyre, M., and Oudeyer, P.-Y. (2011). «Биовдохновленный позвоночник, комплаентность и полупассивная динамика в легком гуманоидном роботе», в Международная конференция IEEE / RSJ по интеллектуальным роботам и системам (IROS), 2011 г., (Сан-Франциско, Калифорния: IEEE), 1465–1472.
Google Scholar
Манцерон, П. (2015). Производительность и модульность библиотеки обратной кинематики .
Google Scholar
Маркович, М., Дозен, С., Чиприани, К., Попович Д., Фарина Д. (2014). Стереозрение и дополненная реальность для управления захватом в протезах кисти с обратной связью. J. Neural Eng. 11: 046001. DOI: 10.1088 / 1741-2560 / 11/4/046001
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Маркович М., Дозен С., Попович Д., Грейманн Б. и Фарина Д. (2015). Слияние датчиков и компьютерное зрение для контекстно-зависимого управления протезом с несколькими степенями свободы. J. Neural Eng. 12: 066022.DOI: 10.1088 / 1741-2560 / 12/6/066022
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Маркович, М., Карнал, Х., Грейманн, Б., Фарина, Д., и Дозен, С. (2017). GLIMPSE: интерфейс Google Glass для сенсорной обратной связи в миоэлектрических протезах рук. J. Neural Eng. 14: 036007. DOI: 10.1088 / 1741-2552 / aa620a
PubMed Аннотация | CrossRef Полный текст | Google Scholar
МакМаллен, Д. П., Хотсон, Г., Катиаль, К. Д., Вестер, Б. А., Файфер, М.С., МакГи, Т. Г. и др. (2014). Демонстрация полуавтономного гибридного интерфейса мозг-машина с использованием внутричерепной ЭЭГ человека, отслеживания взгляда и компьютерного зрения для управления роботизированным протезом верхней конечности. IEEE Trans. Neural Syst. Rehabil. Англ. 22, 784–796. DOI: 10.1109 / TNSRE.2013.2294685
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Микер, К., Расмуссен, Т., и Чокарли, М. (2018). Интуитивно понятная ручная телеоперация для начинающих операторов с использованием непрерывного подпространства телеоперации. arXiv [Препринт] arXiv: 1802.04349 . DOI: 10.1109 / ICRA.2018.8460506
CrossRef Полный текст | Google Scholar
Merad, M., de Montalivet, E., Roby-Brami, A., and Jarrassé, N. (2016). «Интуитивное управление протезом с использованием межсуставной координации верхней конечности и измерения углов плеча на основе IMU: пилотное исследование», Международная конференция IEEE / RSJ по интеллектуальным роботам и системам (IROS), 2016 г., (Тэджон: IEEE), 5677–5682 .
Google Scholar
Новак, Д., и Riener, R. (2015). Обзор методов объединения сенсоров в носимой робототехнике. Робот. Auton. Syst. 73, 155–170. DOI: 10.1016 / j.robot.2014.08.012
CrossRef Полный текст | Google Scholar
Фелан, И., Арден, М., Гарсия, К., и Рост, К. (2015). «Изучение виртуальной реальности и обучение протезам», в Virtual Reality (VR), 2015 (Арль: IEEE), 353–354.
Google Scholar
Ракита Д., Мутлу Б. и Глейхер М. (2017). «Метод ретаргетинга движения для эффективного телеуправления манипуляторами роботов на основе имитации», в материалах Proceedings of the 2017 ACM / IEEE International Conference on Human-Robot Interaction (Vienna: ACM), 361–370.
Google Scholar
Ракита Д., Мутлу Б. и Глейхер М. (2018). «RelaxedIK: синтез точного и возможного движения руки робота в реальном времени», в Proceedings of Robotics: Science and Systems (Питтсбург, Пенсильвания).
Google Scholar
Рид Р. Д. и Маркс Р. Дж. (1998). Neural Smithing: контролируемое обучение в искусственных нейронных сетях с прямой связью . Кембридж, Массачусетс: MIT Press.
Google Scholar
Шварц, М., Pastrana, J., Allgeuer, P., Schreiber, M., Schueller, S., Missura, M., et al. (2013). «Гуманоидная открытая платформа подросткового размера NimbRo-OP», в Чемпионат мира по футболу среди роботов , ред. С. Бенке, М. Велозо, А. Виссер и Р. Сюн (Берлин: Springer), 568–575.
Google Scholar
Stoelen, M. F., Bonsignorio, F., and Cangelosi, A. (2016). «Совместное исследование антагонизма исполнительных механизмов и био-вдохновленного управления в печатной руке робота», в International Conference on Simulation of Adaptive Behavior (Aberystwyth: Springer), 244–255.
Google Scholar
Ван Х., Дун Х., Чен З. и Ши Б. Э. (2015). «Гибридный взгляд / мозговой компьютерный интерфейс ЭЭГ для управления рукой робота при выполнении задачи выбора и размещения», в журнале Engineering in Medicine and Biology Society (EMBC), 2015 37-я ежегодная международная конференция IEEE (Милан: IEEE), 1476–1479 .
Google Scholar
Zucker, M., Joo, S., Gray, M. X., Rasmussen, C., Huang, E., Stilman, M., et al. (2015). Универсальная система дистанционного управления роботом-гуманоидом DRC-HUBO. J. Полевой робот. 32, 336–351. DOI: 10.1002 / rob.21570
CrossRef Полный текст | Google Scholar
Создание роботов, которые могут пойти куда угодно
Gif: Дэн Сэлингер
Роботы ходят на ногах десятилетиями. Самые продвинутые роботы-гуманоиды сегодня могут ступать по ровным и наклонным поверхностям, подниматься и спускаться по лестнице и преодолевать труднопроходимую местность. Некоторые даже могут прыгать. Но, несмотря на прогресс, роботы на ногах все еще не могут сравниться по маневренности, эффективности и прочности с людьми и животными.
Существующие шагающие роботы потребляют энергию и проводят слишком много времени в магазине. Слишком часто они терпят неудачу, падают и ломаются. Чтобы роботы-помощники, о которых мы давно мечтали, стали реальностью, этим машинам придется научиться ходить, как мы.
Мы должны создавать роботов на ногах, потому что наш мир создан для ног. Мы проходим через узкие пространства, объезжаем препятствия, поднимаемся и спускаемся по ступенькам. Роботы на колесах или гусеницах не могут легко перемещаться по пространствам, которые мы оптимизировали для нашего собственного тела.
Действительно, у многих гуманоидов ноги похожи на наши, с бедрами, коленями, лодыжками и ступнями. Но на этом сходство обычно заканчивается: если вы сравните, например, силы, которые эти роботы проявляют на земле, с теми, которые проявляет человек, вы обнаружите, что они часто совершенно разные. Большинство гуманоидов, произошедших от ранних промышленных роботов, управляют своими конечностями, чтобы максимально точно и жестко следовать заданным траекториям. Однако передвижение на ногах требует не столько контроля положения, сколько контроля силы, с большой податливостью и эластичностью, известной в робототехнике как податливость, чтобы допускать неожиданные контакты.
Ряд исследовательских групп пытались создать роботов, которые были бы менее жесткими и могли бы двигаться более динамично, как человек. Самый известный из таких роботов — это, пожалуй, Атлас от Boston Dynamics, гуманоид, который может бегать по твердой и мягкой местности, перепрыгивать бревна и даже делать сальто. Но опять же, когда мы сравниваем движение даже самых сложных роботов с тем, на что способны животные, машины терпят неудачу.
Что нам не хватает? Технологии — не самое большое препятствие: двигатели достаточно мощные, материалы достаточно прочные, а компьютеры достаточно быстрые.Скорее, ограничивающим фактором, по-видимому, является наше базовое понимание того, как работает передвижение на ногах.
Реальные дроиды: Agility Robotics спроектировала своих роботов на ногах Кэсси (слева) и Дигит так, чтобы они двигались более динамично, чем обычные роботы. Фотографии: Дэн Сэлингер
В Лаборатории динамической робототехники Университета штата Орегон я возглавляю группу исследователей, стремящихся определить основные принципы передвижения на ногах и применить наши открытия к роботам.Я также являюсь соучредителем и главным техническим директором Agility Robotics, стартапа из Олбани, штат Орегон, который изучает коммерческое использование роботизированной мобильности на ногах. В 2017 году мы представили Cassie — двуногую платформу, которую продали нескольким исследовательским группам. Скоро у нас будет новый робот, готовый выйти в мир: у Digit ноги, похожие на ноги Кэсси, но также есть датчики восприятия и пара рук, которые он будет использовать для стабильности и, в будущем, для манипуляций.
Совместно с лабораторией и компанией мы работаем над созданием будущего, в котором роботы смогут перемещаться куда угодно.Я верю, что роботы с динамическими ногами однажды помогут позаботиться о пожилых и немощных людях в их домах, помогут спасти их жизнь при пожарах и землетрясениях и доставляют посылки к нашим дверям. Роботизированные ноги также позволят использовать экзоскелеты и протезы конечностей с электроприводом, чтобы повысить мобильность людей с ограниченными возможностями. Наконец-то они принесут роботов из научной фантастики в нашу повседневную жизнь.
Некоторые птицы бегают лучше, чем умеют летать, если вообще умеют летать.Страусы, индейки, цесарки и перепелы не умеют парить, как ястреб, но они быстры на ногах. В сотрудничестве с Моникой Дейли из Королевского ветеринарного колледжа Лондонского университета мы с коллегами провели бесчисленное количество часов, наблюдая в лаборатории гуляющих и бегающих птиц. Мы хотим понять, как эти животные передвигаются так ловко и эффективно — большинство этих пернатых машин питаются только семенами!
В одном эксперименте цесарка бежит по следу, когда она наступает на яму, скрытую листом папиросной бумаги.Птица не знала, что собирается ступить в выбоину глубиной примерно в полфута; тем не менее, животное не упускает ни секунды, его лапа вытянута, чтобы приспособиться к падению, когда оно проносится мимо препятствия. То, что здесь происходит, весьма примечательно: мозгу птицы не нужно ощущать волнение и реагировать на него, потому что его ноги могут справиться с этим самостоятельно.
Это важный вывод для разработчиков роботов: если вы сначала создадите своего робота, а только потом попытаетесь запрограммировать его на гибкость, вы, вероятно, обречены на провал.Как и в случае с цесаркой, ловкость робота в значительной степени зависит от внутренних механических свойств его тела или того, что робототехники называют пассивной динамикой. И этому пренебрегали в большинстве проектов с роботами на ногах. Тщательно спроектировав пассивную динамику вашего робота параллельно с программным управлением как интегрированной системой, вы увеличиваете свои шансы создать робота, который приближается к характеристикам животного.
Стоит отметить, что, хотя животные служат нам источником вдохновения, мы не копируем форму птичьей ступни или расположение мышц и костей человеческой ноги.Вместо этого мы хотим зафиксировать физику передвижения животных и абстрагироваться от нее математической модели, которую мы можем понять, протестировать в компьютерном моделировании, а затем реализовать в реальных роботах. Поскольку для создания этих роботов мы используем металл и электронику, а не кости и мозг, они могут сильно отличаться от животных, сохраняя при этом ту же физику.
Одна из простейших математических моделей состоит из точечной массы (представляющей верхнюю часть тела), прикрепленной к паре идеальных пружин, которые представляют собой ноги.Эта модель, известная как модель пружины и массы, конечно, является упрощением; он напоминает фигурку из палочек и не учитывает, что у ног есть суставы или что ступни не касаются земли в отдельных точках. Тем не менее, модель пружинной массы может дать удивительные результаты: в симуляциях она может генерировать практически любую походку при ходьбе и беге, наблюдаемую у людей и животных.
Первые шаги: Ноги ATRIAS не похожи на человеческие, но робот был первой машиной, продемонстрировавшей человеческую динамику ходьбы. Фото: Университет штата Орегон
Для тестирования модели с пружинной массой на машине моя группа в штате Орегон в сотрудничестве с Хартмутом Гейером из Университета Карнеги-Меллона и Джесси Гризл из Университета Мичигана разработала ATRIAS, двуногого робота, чье название является аббревиатурой, отражающей наша основная посылка: предположим, что робот — это сфера. Идея заключалась в том, что пассивная динамика робота могла быть максимально приближена к воспроизведению динамики точечной массы с упругими ногами.
Мы построили каждую опору из легких стержней из углеродного волокна, расположенных в форме параллелограмма, известной как четырехзвенный рычажный механизм. Эта структура [PDF] минимизировала массу опор и связанную с ними инерцию, приближаясь к модели пружинной массы. Мы также оснастили верхнюю часть опор пружинами из стекловолокна, которые физически олицетворяют «пружинную» часть модели, выдерживая удары о землю и сохраняя механическую энергию.
Сначала ATRIAS еле стоял, и мы поддерживали его подвесным тросом.Но когда мы усовершенствовали его контроллер, который отслеживал скорость и наклон тела, робот сделал свои первые шаги и вскоре начал расхаживать по лаборатории. Затем ATRIAS научился оправляться от нарушений, которые в одном эксперименте состояли в том, что мои ученики бросали в него вышибалы. Мы также вывели ATRIAS на футбольное поле университета, разогнали робота до максимальной скорости 7,6 км в час (4,7 миль в час), а затем быстро остановили его — конечно, в конечной зоне.
Чтобы лучше понять, что делает робот, представьте, что у вас завязаны глаза и вы носите ходули, а верхняя часть тела завернута в ковер, чтобы вы не могли балансировать руками.Все, что вы можете делать, это продолжать шагать, и это то, что сделала ATRIAS. Он даже смог справиться с препятствиями, такими как груда фанеры, помещенная на его пути.
Несмотря на то, что маневренность была важна, важно также, чтобы ATRIAS экономила на мощности. Мы подтвердили это, когда измерили параметр, известный как стоимость перевозки (COT). Он определяется как отношение потребляемой мощности к весу, умноженное на скорость, и используется для сравнения энергоэффективности движения животных и машин. Чем ниже COT, тем лучше.Например, у идущего человека COT составляет 0,2, в то время как у обычных гуманоидных роботов значения намного выше — по некоторым оценкам [PDF]. Наши эксперименты показали, что ATRIAS в режиме ходьбы имеет COT 1,13 [PDF], демонстрируя преимущества эффективности динамических роботов [PDF]. В самом деле, несколько небольших литий-полимерных батарей — типа, используемого в радиоуправляемых автомобилях — могли поддерживать работу ATRIAS около часа.
Мы также измерили силы [PDF], которые робот прилагал к земле.Мы поместили ATRIAS, который весит 72,5 килограмма, или примерно столько же, как человек, на силовую пластину, инструмент, который часто используется в спортивной медицине для оценки походки человека путем измерения силы реакции земли. Пока робот шел, мы записывали данные о силе. Затем мы заменили АТРИАСА одним из моих учеников и записали его шаги. Когда мы построили график сил реакции земли с течением времени, два набора данных имели абсолютно одинаковую форму. Насколько нам известно, это наиболее реалистичная роботизированная реализация динамики походки человека из когда-либо созданных.
Результаты подтвердили, что простая система с приводом от пружины и массы может быть встроена в робота; задействовать многие качества, которые мы ищем, такие как эффективность, надежность и маневренность; и проникнуть в суть того, что такое передвижение на ногах. Пришло время построить нашего следующего робота.
Dynamic Walker: для быстрого передвижения по сложной местности Кэсси использует пять двигателей и две пружины на каждой ноге. Фото: Дэн Сэлингер
Кэсси — это динамический ходунок , как ATRIAS.Мы оптимизировали каждый аспект его конструкции с целью создания прочного и способного робота, который Agility Robotics могла бы коммерциализировать. И мы установили высокую планку: мы хотели, чтобы Кэсси могла бегать по лесу, преодолевать бездорожье и часами работать от батареи без страховочного троса.
Cassie основывается на тех же концепциях, разработанных для ATRIAS, но мы решили придать ему совершенно новые возможности. Мы использовали два двигателя для приведения в действие четырехзвенного рычага на каждой опоре ATRIAS. Такая компоновка сводила к минимуму их массу, но имел место компромисс: во время части шагового цикла один двигатель действовал как тормоз для другого, излишне затрачивая значительную энергию.Для Кэсси мы изучили альтернативные конфигурации ног [PDF], чтобы устранить этот эффект. Новый дизайн позволяет уменьшить размеры двигателей, что делает робота даже более эффективным, чем был ATRIAS.
Важно отметить, что конфигурация ноги Кэсси была результатом этого анализа. Тот факт, что нога похожа на ногу страуса или другого теропода, может быть признаком того, что мы на правильном пути, но нашей целью никогда не было создать робота, который с несколькими удачно расположенными перьями мог бы идеально вписаться в толпа эму.
Каждая нога Кэсси имеет пять осей движения — или степеней свободы, говоря языком роботов, — каждая из которых приводится в движение двигателем. Бедра имеют три степени свободы, как и у нас, что позволяет ноге качаться в любом направлении. Два других двигателя приводят в движение суставы колена и стопы. У Кэсси есть дополнительные степени свободы в голени и лодыжке; они пассивны, не управляются двигателями, а прикреплены к пружинам, которые помогают роботу перемещаться по сложной местности, с которой плосконогие гуманоиды не могут справиться.
Новые ноги Кэсси требовали более сложного контроллера нижнего уровня, чем ATRIAS. С ATRIAS удлинение ноги было достигнуто простым приложением равных и противоположных крутящих моментов с двумя двигателями. В случае с ногой Кэсси, перемещение ступни в определенном направлении требует расчета разных крутящих моментов для каждого двигателя. Для этого контроллеру необходимо учитывать инерцию ног, а также динамику двигателей и коробок передач.
Step By Step: контроллер Кэсси использует запланированное размещение шагов и динамическую балансировку, чтобы позволить роботу подниматься по лестнице. Gif: Дэн Сэлингер
Да, проблема управления стала более сложной, но этот метод позволяет повысить производительность и расширить диапазон действий. Кэсси может развивать скорость ходьбы 5 км / ч с помощью одного из наших начальных контроллеров. Потребляемая мощность колеблется от 100 Вт (стоя) до примерно 300 Вт (ходьба), а литий-ионный аккумулятор обеспечивает около 5 часов непрерывной работы. Новые ноги также позволяют Кэсси управлять так, как не может ATRIAS. А благодаря механизму ступного сустава он может стоять на месте без необходимости постоянно двигать ногами, как это делает ATRIAS.
Кэсси также весит всего 31 кг (68 фунтов), что вдвое меньше, чем ATRIAS. Вы можете погрузить двух Кэсси в багажник автомобиля менее чем за минуту. И он намного прочнее: его части корпуса изготовлены из алюминия и углеродного волокна, а защитная оболочка из термоформованного акрил-поливинилхлорида, прочного пластика, защищает его от столкновений и падений.
Кэсси еще не бегает по лесу. Но мы вывели его на улицу, без страховочных ремней, и он ходил по грязи, траве и усыпанным листьями тропинкам.Сейчас мы изучаем, как интегрировать динамическое поведение робота с планированием движения [PDF], что позволяет ему, например, подниматься по лестнице. Мы также работаем над другой функцией, которая может сделать такого робота, как Кэсси, намного более полезным: руки.
Совершенно новое тело: у Digit ноги, похожие на ноги Кэсси, но у него также есть торс, заполненный датчиками, и пара рук, предназначенная для обеспечения мобильности и равновесия. Фото: Дэн Сэлингер
Digit является прямым потомком Кэсси.У него похожие ноги, но мы добавили туловище и пару рук. Руки спроектированы так, чтобы помочь роботу в подвижности и равновесии, поскольку они качаются в координации с походкой. Они также позволят Дигиту поймать себя при падении и переориентировать его тело, чтобы снова подняться.
Есть еще кое-что, что есть у Digit, чего не было у Кэсси: интегрированное восприятие. Мы добавили к роботу множество датчиков, в том числе лидар на торсе. Эти датчики помогут собрать данные, позволяющие роботу перемещаться по миру, полному препятствий, таких как загроможденные комнаты и лестницы, и полагаться на лежащую в основе стабильную динамику только при обработке неожиданных ситуаций и обнаружении ошибок.
Digit и последующим за ними роботам на ногах еще предстоит пройти долгий путь. Но мы уверены, что они изменят мир. Их влияние может быть таким же большим, как и автомобиль, с точки зрения изменения образа жизни и даже схем движения и аспектов городской планировки, где эти роботы обещают преобразовать логистику и доставку посылок.
В недалеком будущем, когда автомобили получат автономию, автопроизводители и компании по совместному использованию поездок, такие как Lyft и Uber, будут владеть большим парком транспортных средств, которые будут перевозить людей, с пиковым трафиком в час пик, как и сегодня.Но что будут делать эти автоматизированные автомобили поздно ночью и в середине дня? Вместо того, чтобы просто бездействовать, они могут перевезти ваши посылки с автоматизированных складов к вам домой. Однако эти средства доставки застряли у обочины: без человека доставить посылку к вашему порогу — серьезная проблема. Вот тут-то и пригодятся роботы на ногах. Двигаясь на этих машинах, они преодолеют последние несколько метров. Хотя колеса и крылья могут выполнять некоторые из этих ролей, в мире, созданном для двуногих, никакая мобильная платформа не может быть столь же универсальной, как робот на ногах.
Специальная доставка: Digit учится ходить по разным типам местности, а также подниматься по лестнице, поэтому однажды он может доставлять посылки прямо к вашей двери. Фотографии: Дэн Сэлингер
Роботы-доставщикистанут частью все более автоматизированной логистической системы, которая идет от производителей и торговых посредников прямо к вашей двери. Эта система снизит стоимость доставки до тех пор, пока не станет значительно дешевле доставлять товары к вам домой, чем покупать их на большом, хорошо освещенном, отапливаемом и доступном для людей складе.Крупные магазины, которые сегодня продают то, что по сути является товаром, станут излишними. Конечно, люди по-прежнему будут получать удовольствие от покупок в магазине определенных товаров. Но при покупке продуктов на неделю роботы-доставщики сэкономят ваше время и деньги.
Legged Locomotion также поможет принести роботов в наши дома и на работу. Роботы, которые могут перемещаться по лестнице и загромождению окружающей среды, при этом безопасно взаимодействуя с людьми на уровне глаз и в человеческом масштабе, позволят нам изящно стареть в наших собственных домах.Они помогают переносить вещи и служат в качестве устройств телеприсутствия, позволяя членам семьи и друзьям использовать робота для удаленного общения с людьми и составления им компании.
Legged Robots также отправятся туда, где опасно для человека. Они будут прыгать с парашютом в лесных пожарах, чтобы собирать данные в режиме реального времени, бросаться в горящие здания, чтобы проверить, нет ли там людей, или войдут в зоны бедствия, такие как атомная электростанция Фукусима-дайити, чтобы исследовать труднодоступные районы. Они будут проводить регулярные осмотры внутренних пространств плотин гидроэлектростанций и исследовать заброшенные шахты, так что нам не придется.
Чтобы попасть в это будущее, необходимо решить множество проблем. Но я убежден, что сообщество робототехники может сделать эту технологию практичной. Это будет один маленький шаг для робота, один гигантский скачок для человечества.
Эта статья опубликована в печатном выпуске за март 2019 г. как «Walk This Way».
Об авторе
Джонатан Херст — технический директор и соучредитель компании Agility Robotics, а также доцент кафедры робототехники и профессор декана инженерного колледжа Университета штата Орегон.Он имеет степень бакалавра наук. в машиностроении и M.S. и к.т.н. по робототехнике, все из Университета Карнеги-Меллона. Его университетские исследования сосредоточены на понимании фундаментальной науки и передовых технических методов передвижения на ногах. Компания Agility Robotics использует это исследование для разработки коммерческих приложений для мобильности роботов на ногах.
Взаимодействие человека и робота — обзор
Влияние во взаимодействии человека и робота
Раннее исследование взаимодействия человека и робота ( HRI ) показало, что люди склонны «персонифицировать» компьютеры (Scheibe & Erwin, 1979).Субъекты в исследовании Шайбе и Эрвина использовали личные местоимения («ты» или «он / она») для компьютеров и были очень эмоционально вовлечены в простую стратегическую игру с компьютером. Такое поведение не было связано с реальной производительностью игры, показывая диссоциацию между нормативным, рациональным взаимодействием с компьютером и конкретными социально-эмоциональными реакциями пользователя-человека. В соответствии с этими выводами, Ривз и Насс (1996) разработали теорию уравнения среды , которая утверждает, что, поскольку взаимодействие человека с машиной является естественным и социальным по своей природе, правила взаимодействия человека и человека также применимы к взаимодействиям человек-машина.
Опираясь на идеи теории уравнения медиа, Насс и его коллеги (Nass & Moon, 2000; Nass, Moon, Morkes, Kim, & Fogg, 1997b; Nass, Steuer, Henriksen, & Dryer, 1994) демонстрируют, что люди-пользователи склонны взаимодействовать с компьютерами, как если бы они были независимыми социальными субъектами ( компьютеров в качестве социальных субъектов , CASA ). Теория CASA утверждает, что, во-первых, люди используют те же правила и эвристику при взаимодействии с компьютером, что и при взаимодействии с людьми, а во-вторых, будучи «бездумными», человеческие акторы не осознают своего поведения по отношению к компьютерам.Используя теории социальной психологии и эмпирические тесты, ряд исследований подтвердил идеи, лежащие в основе CASA. Например, в студенческих выборках определенные стереотипы, которые, как предполагалось, применимы только к людям, также использовались при взаимодействии с компьютерами. Например, в одном исследовании (Nass, Moon, & Green, 1997a) участники демонстрировали стереотипное гендерное поведение при взаимодействии с компьютером мужским, женским или нейтральным голосом. В другом исследовании (Nass, Isbister, & Lee, 2000) участникам были показаны видео с людьми той же или другой этнической принадлежности.В одном случае им сказали, что они взаимодействуют с человеком, в другом — они думали, что взаимодействуют с программным агентом. В обоих случаях участники продемонстрировали стереотипные внутригрупповые предпочтения. Из подобных исследований был сделан вывод, что люди бездумно реагируют на социальные сигналы, независимо от того, исходят они от машины или нет.
Модель CASA утверждает, что люди будут иметь тенденцию взаимодействовать с компьютерами, как если бы они были людьми, даже если компьютеры совсем не похожи на них.Насс и Мун (2000) добавляют, что тенденция человека-пользователя проявлять человеческое поведение по отношению к машине возрастает, когда степень человеческого сходства (например, персонализированный интерфейс; использование языка; отображение человеческого лица; выражение эмоций; интерактивность) увеличивается.
Идея о том, что подобие человека в машине увеличивает склонность человека к позитивному взаимодействию с ней, также была выдвинута в других исследованиях взаимодействия человека и робота (см., Например, Cappella & Pelachaud, 2002).Исследования Брюса, Нурбахша и Симмонса (2001) показали, что люди более склонны к взаимодействию с роботом, если робот имеет человеческое лицо и если он двигает головой (подвижный экран). Факторами, которые способствуют человеческой тенденции к антропоморфизации роботов, являются независимое движение (см., Например, Tremoulet & Feldman, 2000) и лицо с глазами (см. Scassellati, 2002). Однако подобие человека имеет свои пределы, как показывают исследования с использованием гипотезы сверхъестественной долины .Гипотеза сверхъестественной долины, первоначально предложенная японским робототехником Масахиро Мори (1982), утверждает, что люди положительно реагируют на увеличение человеческого сходства роботов, но в случае небольшого отклонения от идеального человеческого подобия они имеют тенденцию реагировать пренебрежительно. Эмпирические исследования последних лет позволили проанализировать эффект сверхъестественной долины с разных точек зрения, например, с точки зрения развития (Lewkowicz & Ghazanfar, 2012) и с помощью отслеживания взгляда (Cheetham, Pavlovic, Jordan, Suter, & Jäncke, 2013), а также функциональная визуализация мозга (Cheetham, Suter, & Jäncke, 2011).
Однако пока мало доказательств того, что люди действительно эмоционально реагируют на роботов. Исследования, изучающие эмоциональные реакции людей при нанесении вреда роботу или наблюдению за тем, как роботу причиняют вред (Bartneck & Hu, 2008; Rosenthal-von der Pütten, Krämer, Hoffmann, Sobieraj, & Eimler, 2013; Slater et al., 2006), продемонстрировали, что готовность участников «навредить» роботу выше, чем их готовность причинить вред человеку в классическом эксперименте Милграма, и что почти все участники были готовы уничтожить робота, чего они, вероятно, не стали бы, если бы это был «Настоящее» живое существо.На первый взгляд, эти результаты могут противоречить идее человеческого сходства во взаимодействиях человека и робота. Но в то же время почти все здоровые участники сообщали об одних и тех же негативных чувствах, тех же моральных опасениях, а также о том же возбуждении и стрессе, которые они испытали бы, если бы их попросили причинить вред или убить живое существо, даже если «пострадал» робот — это всего лишь робот с функциональным, неэмоциональным воплощением. Розенталь-фон дер Пюттен и др. (2013) утверждают, что эта эмоционально-поведенческая диссоциация происходит из-за осознания того, что никакого реального вреда не наносится, потому что робот не является живым существом, и что это самооправдание компенсирует эмоциональную реакцию.Также было продемонстрировано, что люди приписывают роботам эмоциональные состояния и соответствующим образом корректируют свое поведение (Eimler, Krämer, & von der Pütten, 2011). Эти результаты согласуются с выводом, сделанным в упомянутом выше исследовании Шайбе и Эрвина, о том, что существует диссоциация между рациональным поведением, с одной стороны, и социально-эмоциональной реакцией, с другой. Одно из объяснений, которое может объяснить эти, казалось бы, противоречивые результаты, — это содержание ментальных моделей, которые люди используют при рассмотрении роботов.Эти ментальные модели содержат схемы, убеждения и эвристики, определяющие категорию объектов, к которой принадлежит рассматриваемый объект. Они формируются автоматически, когда новый объект вызывает извлечение опыта и знаний из долговременной памяти, которые определяют реакцию на рассматриваемый объект (см. Gentner & Markman, 1997, для получения дополнительной информации о задействованных когнитивных процессах). Комбинируя этот опыт и знания, ментальная модель объекта возникает более или менее мгновенно в течение первых двух минут взаимодействия (Powers & Kiesler, 2006).Предполагается, что сигналы запускают одновременный поиск, независимо от того, являются ли извлеченные категории взаимоисключающими (Hintzman, 1986). Таким образом, ментальная модель робота вполне может содержать характеристики, типичные для механических роботов и живых существ одновременно. Поскольку ментальные модели включают как эмоции, так и рассуждения, интеграция разрозненных характеристик в одну ментальную модель может объяснить диссоциацию между рациональным поведением и социально-эмоциональной реакцией (см. Kiesler & Goetz, 2002; Powers & Kiesler, 2006).
Хотя рациональные реакции на механические свойства робота иногда кажутся сильнее эмоциональных реакций на его естественные особенности, это не всегда так. Ряд исследований (Kidd, Taggart, & Turkle, 2006; Klamer & Ben Allouch, 2010; Turkle, 2005; Wada, Shibata, Saito, Sakamoto, & Tanie, 2005) подтверждают, что люди проявляют сочувствие к роботу, заботятся о нем и формируют привязанности, напоминающие привязанности настоящих животных и человеческих младенцев. Интересно, что Кидд и соавт.(2006) сообщают, что большинство пожилых участников интервенционного исследования с роботоподобным роботом сообщили, что не удосужились ответить на вопрос, жив ли робот или нет, но тем не менее им понравилось. Об отрицательных эмоциональных реакциях сообщается у ряда жителей домов престарелых, которые боятся взаимодействия с роботоподобным животным, потому что они беспокоятся, что он может укусить (хотя это в основном сообщается для людей с деменцией), или испытывают стресс, когда от них ожидается взаимодействуют с роботом-животным или младенцем в течение длительного периода времени, потому что чувствуют, что ответственность для них слишком велика.
В целом исследования HRI показывают, что люди, как правило, взаимодействуют с компьютерами и роботами так же, как и с людьми. Чем больше человеческое сходство, тем сильнее склонность человека-пользователя реагировать на машину, как если бы она была живым существом. Однако эта тенденция резко и внезапно снижается, когда робот почти, но не полностью, неотличим от реального живого существа, и на смену ей приходят отталкивающие эмоциональные реакции. Эти отношения усложняются тем, что немногочисленные исследования эмоций по отношению к роботам показывают, что, хотя люди действительно проявляют сочувствие к роботам, заботятся об их благополучии и формируют привязанности, напоминающие привязанности к реальным животным или младенцам, когнитивное мышление может компенсировать эти тенденции.Возможным объяснением противоречивых результатов может быть формирование ментальных моделей роботов, которые содержат аспекты как машин, так и живых существ.
Полная история и будущее роботов
Современные роботы мало чем отличаются от малышей: забавно наблюдать, как они падают, но в глубине души мы знаем, что если мы будем слишком сильно смеяться, у них может развиться комплекс и вырасти, чтобы начать мировую войну. III. Ни одно из творений человечества не вызывает такого запутанного смешения трепета, восхищения и страха: мы хотим, чтобы роботы делали нашу жизнь проще и безопаснее, но мы не можем заставить себя доверять им.Мы создаем их по нашему собственному образу, но боимся, что они нас вытеснят.
Но этот трепет не является препятствием для бурно развивающейся области робототехники. Роботы, наконец, стали достаточно умными и физически способными, чтобы покидать фабрики и лаборатории, ходить, кататься и даже прыгать среди нас. Машины прибыли.
Вы можете беспокоиться, что робот украдет вашу работу, и мы это понимаем. В конце концов, это капитализм, а автоматизация неизбежна. Но у вас может быть больше шансов работать вместе с роботом в ближайшем будущем, чем один заменяет вас.И даже лучшая новость: у вас больше шансов подружиться с роботом, чем однажды убить вас. Ура на будущее!
История роботов
Определение «робот» сбивало с толку с самого начала. Слово впервые появилось в 1921 году в пьесе Карела Чапека « R.U.R. , или универсальные роботы Россум. «Робот» происходит от чешского «принудительный труд». Однако эти роботы были скорее роботами по духу, чем по форме. Они были похожи на людей, и были сделаны не из металла, а из химического теста.Роботы были намного более эффективными, чем их человеческие аналоги, а также гораздо более убийственными — в конечном итоге они устроили череду убийств.
R.U.R. установит образ машины, которой нельзя доверять (например, Терминатор , Степфордские жены , Бегущий по лезвию и т. Д.), Который продолжается и по сей день, что не означает, что поп-культура не является раем. Мне не нравятся более дружелюбные роботы. Вспомните Рози из The Jetsons . (Орнери, конечно, но уж точно не убийца.) И нет ничего более дружелюбного к семье, чем Робин Уильямс в роли Bicentennial Man .
Реальное определение «робота» столь же скользкое, как и эти вымышленные изображения. Спросите 10 робототехников, и вы получите 10 ответов — например, насколько автономным он должен быть. Но они согласны с некоторыми общими принципами: робот — это разумная, физически воплощенная машина. Робот может до некоторой степени выполнять задачи автономно. А робот может ощущать окружающую среду и управлять ею.
Представьте себе простой дрон, которым вы управляете. Это не робот. Но дайте дрону возможность взлетать и приземляться самостоятельно и ощущать объекты, и вдруг он станет намного более роботизированным. Ключ в этом — интеллект, чутье и автономия.
Но только в 1960-х компания создала что-то, что начало соответствовать этим принципам. Именно тогда SRI International в Кремниевой долине разработала Shakey, первого по-настоящему мобильного и восприимчивого робота. Эта башня на колесах получила удачное название — неуклюжая, медленная, нервная.Оборудованный камерой и датчиками ударов, Shakey мог перемещаться в сложной среде. Машина выглядела не особенно уверенно, но это было начало робототехнической революции.
Примерно в то время, когда Шейки дрожал, руки роботов начали преобразовывать производство. Первым среди них стал Unimate, который занимался сваркой кузовов автомобилей. Сегодня его потомки управляют автомобильными заводами, выполняя утомительные и опасные задачи с гораздо большей точностью и скоростью, чем мог бы сделать любой человек.Несмотря на то, что они застряли на месте, они по-прежнему очень соответствуют нашему определению робота — это умные машины, которые чувствуют окружающую среду и манипулируют ею.
Роботы, однако, оставались в основном ограниченными фабриками и лабораториями, где они либо катались, либо застревали на месте, поднимая предметы. Затем, в середине 1980-х годов, Хонда запустила программу по робототехнике гуманоидов. Он разработал P3, который мог чертовски хорошо ходить, а также махать и пожимать руки, к большому удовольствию от комнаты, полной костюмов.Кульминацией работы должен был стать знаменитый двуногий Азимо, который однажды попытался победить президента Обаму с помощью футбольного мяча с удачным ударом ногой. (Хорошо, возможно, это было более невинно.)
Сегодня продвинутые роботы появляются повсюду . В частности, за это можно поблагодарить три технологии: датчики, исполнительные механизмы и искусственный интеллект.
Итак, датчики. Машины, которые катятся по тротуарам, чтобы доставить фалафель, могут перемещаться по нашему миру во многом благодаря Darpa Grand Challenge 2004 года, в котором команды робототехников собирали вместе беспилотные автомобили, чтобы мчаться по пустыне.Их секрет? Лидар, стреляющий лазерами для построения трехмерной карты мира. Последовавшая гонка частного сектора за разработку беспилотных автомобилей резко снизила цены на лидары до такой степени, что инженеры могут создавать роботов для восприятия по (относительно) дешевым ценам.
Лидар часто сочетается с так называемым машинным зрением — 2- или 3-мерными камерами, которые позволяют роботу создавать еще более четкую картину своего мира. Вы знаете, как Facebook автоматически распознает вашу кружку и отмечает вас на фотографиях? Тот же принцип с роботами.Необычные алгоритмы позволяют им выделять определенные ориентиры или объекты.
Датчики — это то, что не дает роботам врезаться в предметы. Они — то, почему своего рода робот-мул может следить за вами, преследовать вас и таскать ваши вещи; Машинное зрение также позволяет роботам сканировать вишневые деревья, чтобы определить, где их лучше всего встряхнуть, помогая заполнить огромные пробелы в рабочей силе в сельском хозяйстве.
10 гуманоидных роботов 2020 г.
Роботы бывают разных форм и размеров. Но, пожалуй, самые интригующие, милые и приемлемые — это те, которые похожи на нас, людей.Роботы-гуманоиды используются для исследований и освоения космоса, личной помощи и ухода, образования и развлечений, поиска и спасения, производства и обслуживания, связей с общественностью и здравоохранения.
До пандемии коронавируса и экономической неопределенности компания Stratistics Market Research Consulting ожидала, что к 2026 году мировой рынок роботов-гуманоидов достигнет 13 миллиардов долларов. технологии автоматизации, поскольку врачи боролись с COVID-19.
Например, полевой госпиталь с роботами — «Умный полевой госпиталь» — открылся в Ухане, Китай, в начале марта. Там роботы-гуманоиды, подаренные CloudMinds Technology, компанией из Кремниевой долины, дезинфицируют, измеряют температуру, доставляют еду и лекарства, а также развлекают медицинский персонал и пациентов.
По мере того как вирус распространяется по всему миру, роботы развертываются во многих странах. Некоторые роботы могут помогать уставшим медсестрам в больницах, выполнять основную уборку и доставку, другие могут помогать на складах, а промышленные роботы могут помогать поддерживать производство для производственных компаний, пока их коллеги-люди находятся в карантине.
Вот еще 10 гуманоидов 2020 года. 1. Аватар робота
Первоначально представленный Toyota в 2017 году, T-HR3 представляет собой робот-гуманоид, который имитирует движения своего человека-оператора, как настоящий аватар. Обновленный для Олимпийских игр в Токио, T-HR3 имеет улучшенное управление и может ходить более естественно. Задуманные как служба мобильности, в будущем эти гуманоиды смогут проводить операции, в то время как их операторы, люди-врачи, будут контролировать их из другой части мира.Это также может помочь лицам, осуществляющим уход, выполнять свою работу удаленно или тем, кто нуждается в помощи, вести более независимую жизнь.
«Часто говорят, что человеческая форма полезна, потому что робот может использовать те же инструменты и среду, что и человек, но еще одна важная причина заключается в том, что людям легче всего управлять роботами в гуманоидной форме», — пояснил T -Лидер команды разработчиков HR3 Томохиса Моридаира.
2. Робототехнический посол
Возможно, наиболее узнаваемым лицом гуманоидов является София, социальный гуманоид, разработанный гонконгской компанией Hanson Robotics.
В 2020 году четырехлетний робот с искусственным интеллектом продолжит свою роль посланника робототехники, помогая продвигать исследования в области робототехники и взаимодействия человека с роботом.
Обучаемая людьми, София может двигаться, говорить, проявлять эмоции, рисовать и петь.
В январе было объявлено, что Ford стал первым клиентом, внедрившим Digit от Agility Robotics в заводские установки. У безголового гуманоида подвижные конечности и множество сенсоров.Он может перемещаться по лестнице, различным препятствиям и всевозможным ландшафтам. Он может балансировать на одной ноге, но обычно он ходит вертикально и достаточно силен, чтобы поднимать и складывать коробки весом до 40 фунтов. Он также может складываться для компактного хранения.
Ford предполагает, что Digit будет ездить на автомобиле без водителя и доставлять посылки клиентам, автоматизируя весь процесс доставки. На данный момент компания будет тестировать реакцию людей на встречу с этим андроидом.
4.Исследовательский гуманоид
Инженеры-механики из Иранского университета Тегерана работают над роботами Surena с 2010 года. Их последняя модель, Surena IV, представляет собой гуманоида взрослого размера, который, как сообщается, способен обнаруживать лица и объекты, распознавать и воспроизводить речь, а также может ходить с скорость 0,7 километра в час. Он имеет 43 степени свободы, а его ловкие руки могут захватывать самые разные формы. Инженеры используют Surena для исследования двуногого передвижения, искусственного интеллекта, а также для привлечения студентов к карьере в инженерии.
Рекомендуем вам: Знакомьтесь, ваши коллеги-роботы
5. Цифровые гуманоиды
Цифровые люди выглядят и действуют как люди, но полностью виртуальны. Одним из примеров являются неоны Samsung Technology and Advanced Research (STAR) Labs, созданные на основе искусственного интеллекта существа с уникальными характерами и внешностью. Эти искусственные люди не предназначены для ответа на какие-либо вопросы, такие как Alexa или Siri, но должны демонстрировать эмоции, учиться на собственном опыте и вести настоящие беседы.Каждый Neon генерируется компьютером и не обязательно основан на реальных людях, и каждый может быть настроен для другой роли, например, виртуального врача или инструктора по йоге.
6. Робот-бармен
Kime — это робот для подачи еды и напитков, разработанный Macco Robotics в Испании. У него человеческая голова и туловище с двумя руками внутри киоска. Протестированный на заправочных станциях в Европе и на одной из испанских пивоварен, Kime, как известно, неплохо разливает пиво и может подавать до 300 стаканов в час.
Гуманоид имеет от 14 до 20 степеней свободы, имеет интеллектуальные датчики и использует машинное обучение для улучшения своих навыков.
Engineered Arts — британская компания, основанная режиссером Уиллом Джексоном в 2004 году, которая производит различных развлекательных гуманоидов в сотрудничестве между художниками, механиками, компьютерными инженерами и аниматорами. Например, их первый гуманоид — хорошо известный РобоТеспиан — это робот-актер, который поставляется с библиотекой впечатлений, приветствий, песен и жестов.
Некоторые из них могут быть добавлены вместе, чтобы стать роботизированным театром, интегрированной системой роботов, дорожками движения, программным обеспечением для анимации, сенсорным управлением, освещением, звуком и управлением внешними устройствами. Компания работает над добавлением в RoboThespian возможности самостоятельной ходьбы, но пока движение может быть организовано через скрытую систему гусениц и тележек.
Вам также могут понравиться: Эти не те дроиды, которых вы ищете
Несколько стран работали над гуманоидами для исследования космоса. В Индии Вьоммитра, женщина-гуманоид-робот, должна запустить беспилотный космический полет в декабре 2020 года. Планируется, что робот проведет эксперименты в условиях микрогравитации, чтобы помочь подготовиться к будущим пилотируемым миссиям.
Федор, или Final Experimental Demonstration Object Research, был российским гуманоидом с дистанционным управлением, который летел на Международную космическую станцию (МКС) в 2019 году, где он моделировал ремонт во время выхода в открытый космос, а затем вернулся на Землю.
Космический центр имени Джонсона НАСА работал над несколькими гуманоидами, включая Робонавта 2 (который провел семь лет на борту МКС) и Валькирию. Вполне возможно, что будущие космические гуманоиды будут спроектированы так, чтобы выдерживать суровые условия Луны или Марса.
9. Обучающий робот
Перец SoftBank Robotics был разработан, чтобы быть дружелюбным помощником по чтению эмоций при работе в приемной, в розничной торговле и даже в качестве няни. Теперь Pepper поставляется с образовательной интегрированной средой разработки (IDE) под названием Tethys, которая была создана для обучения студентов программированию.Используя программное обеспечение, ученики могут запрограммировать гуманоида, чтобы он двигался, разговаривал, жестикулировал и отображал различные сообщения на своем экране в режиме реального времени. Компания надеется, что эта инициатива вдохновит будущее поколение инженеров и робототехников.
10. Совместные гуманоиды
Большинство гуманоидов по сути своей являются сотрудниками людей. Например, Nextage от Kawada Robotics — это платформа для исследования гуманоидов промышленных коботов для Индустрии 4.0. Компания Armar из технологического института Карлсруэ в Германии была разработана для выполнения работ по техническому обслуживанию вместе с людьми в промышленных условиях.
С другой стороны, Walker от UBtech Robotics предназначен для взаимодействия с людьми в их домах. Гуманоид, оснащенный манипуляторами с семью степенями свободы, был разработан для выполнения домашних задач и управления умным домом.
Дарья Меркушева — технический писатель из Нью-Йорка.
Ученые создают искусственную кожу для роботов-андроидов
Йово Марьянович / EyeEm | EyeEm | Getty Images
Роботы могут перехитрить людей, но могут ли они понять, что значит быть людьми?
Ученые продвигают роботов в этом континууме, разрабатывая роботизированную кожу, которая помогает им обрести осязание.Исследователи из Мюнхена, Японии и Бостона в настоящее время изучают, как вызвать у роботов тактильные ощущения и, в некоторых случаях, почувствовать боль.
Стремление к созданию этой технологии является ответом на рост автоматизации. В настоящее время в мире насчитывается около 3 миллионов промышленных роботов. По оценкам Oxford Economics, к 2030 году роботы вытеснят 20 миллионов человек во всем мире. По данным Allied Market Research, совокупный годовой темп роста (CAGR) промышленных роботов к 2023 году составит 9,4%.
Расширение возможностей роботов для более практических применений. Робот-сенсор может различать текстуру поверхности и силу при контакте. Некоторые роботы также могут обнаруживать изменения температуры.
В то время как эти звуковые эзотерические чувства, Элизабет Смела, профессор машиностроения в Университете Мэриленда, указывает на более яркий пример. «Было бы полезно вернуться назад и почувствовать, как кто-то прикасается», — сказала она. Без такой осведомленности рабочий-человек может стать предвзятым против своего коллеги-робота.
Осведомленность — это лишь одна из граней человеческого бытия, которую ученые пытаются привнести в роботов. В то время как некоторые черты характера — например, чувство морали — кажутся запрещенными, другие черты, такие как сострадание и юмор, кажутся справедливой игрой.
Создание скинов для роботов
Для некоторых ключом к улучшению роботов является их познание в мире как можно более похоже на людей. Например, создание кожи для роботов — цель различных исследователей по всему миру. В прошлом году исследователи представили искусственную кожу, разработанную Мюнхенским техническим университетом.Искусственная кожа, состоящая из силиконовых ячеек шестиугольной формы диаметром около 1 дюйма, может обнаруживать контакт, ускорение, близость и температуру.
Кожа — самый большой орган человеческого тела, она полна нервных окончаний, которые позволяют нам мгновенно получать информацию о температуре, давлении и боли.
Джон Яннис Алоимонос, профессор факультета компьютерных наук Университета Мэриленда, сказал, что такая искусственная кожа «позволяет роботам более детально и с большей чувствительностью воспринимать окружающую среду.Это не только помогает им безопасно передвигаться. Это также делает их более безопасными при работе рядом с людьми и дает им возможность предвидеть и активно избегать несчастных случаев ».
Исследователи говорят, что кожа важна, потому что роботу необходимо различать невысказанное общение, происходящее между людьми. квантовый скачок для роботов. Его также можно комбинировать с другими «роботизированными чувствами», такими как зрение или слух.
[Искусственная кожа] позволяет роботам воспринимать окружающую среду гораздо более детально и с большей чувствительностью.Это не только помогает им безопасно передвигаться. Это также делает их более безопасными при работе рядом с людьми и дает им возможность предвидеть и активно избегать несчастных случаев.
Джон Яннис Алоимонос
профессор факультета компьютерных наук Мэрилендского университета
Развитие органов чувств рассматривается как ключ к расширению функциональности роботов. «Мы используем тактильную обратную связь, чтобы получать больше информации о нашем окружении и корректировать наши действия, постоянно получая информацию о том, к чему мы прикасаемся и с чем взаимодействуем», — сказала Даниэла Рус, профессор Массачусетского технологического института, которая является директором Лаборатория компьютерных наук и искусственного интеллекта.Она сказала, что ее цель — «сделать первый шаг к тому, чтобы позволить роботам иметь некоторые из тех же возможностей».
Джон Долан, главный системный ученый в Институте робототехники Карнеги-Меллона, сказал, что разговоры о шоу кожи роботов — это область мягкой робототехники, которая пытается воспроизвести мускулатуру, силу и крутящий момент человеческого тела. Люди считают само собой разумеющимся такое «ощущение силы», то есть способность отличать удар от похлопывания по спине.
Преимущества чувствительной кожи
Роботы с чувствительной кожей имеют ощутимые преимущества.Например, чувствительная кожа может приказать роботу немедленно выключиться при контакте с человеком. Это полезно, поскольку людям не разрешается находиться в одном пространстве с промышленными роботами.
Но есть также проблемы с обтяжкой роботов с точки зрения стоимости и механики. «Если вы хотите охватить всего робота, то нужно подключить множество частей, и от этого будет поступать много данных», — сказал Смела. Лейф Йентоф, соучредитель RightHand Robotics, добавил, что скин робота очень дорогой, и это будет означать, что создатели, скорее всего, « сосредоточатся на областях, которые необходимы для конкретных задач.«
Кожа робота не будет универсальным решением для каждого приложения или отрасли, особенно когда человек может лучше выполнять задачу с меньшими затратами. Брайан Герки, генеральный директор Open Robotics, сказал, что человек работает на конвейере. может почувствовать, если кто-то столкнется с ним, но робот этого не сделает, если он не был запрограммирован на это.
Гордон Ченг разрабатывает искусственную кожу, чтобы обеспечить роботов тактильной обратной связью
Астрид Эккерт | Мюнхенский технический университет
Ученые экспериментировали с использованием живой плоти, чтобы дать роботам больше ощущения человека.В противном случае они склонны использовать искусственные вещества, такие как резина. «Я знаю, что кожа человека или животного — это золотой стандарт для такого рода усилий, и это в основном магия», — сказал Герки. «Насколько мне известно, мы и близко не подошли к этой технологии».
Профессор Джонг-О Пак, заместитель председателя исследовательского комитета Международной федерации робототехники, сказал, что плоть очень сложна, и ее реинжиниринг ускользает от нас прямо сейчас. «Как хорошо известно, живая ткань в основном запрограммирована или сконструирована в ДНК каждой живой клетки в нанометровом масштабе», — сказал он.
Более мягкие роботы используются в обществе
Создание скинов — это только начало. До сих пор роботы использовались в основном из-за их силы и целенаправленного интеллекта, но в следующие несколько лет будет возрастать потребность в роботах, которые внушают чувство человечности.
Соединенные Штаты, население которых в возрасте 65 лет и старше почти удвоится к 2060 году, похоже, движутся по той же траектории, что и другие страны, такие как Германия и Южная Корея, с прогнозируемым сокращением численности населения трудоспособного возраста.
Новые системы ухода за престарелыми, такие как ElliQ от стартапа Intuition Robotics, который предлагает пожилым людям цифровых агентов-компаньонов, напоминающих пациентам о необходимости принимать лекарства и заниматься спортом, являются одним из таких средств, чтобы обеспечить чувство товарищества для пожилых людей.
Таким образом, более мягкие роботы могут позволить более мягкое введение в технологию. В таких роботах может не быть человеческого прикосновения, но они предлагают привкус человечности.
Герки, однако, пренебрежительно относится к попыткам создать роботов-гуманоидов, имитирующих людей.«Гораздо менее убедительный аргумент заключается в том, что для того, чтобы люди принимали роботов в своей жизни, они должны выглядеть и вести себя как люди, — сказал он. — Я не думаю, что это вообще правда».
Не смотри сейчас: как взгляд робота может повлиять на человеческий мозг
1 сентября (Рейтер). Давно известно, что зрительный контакт с роботом может быть неприятным. У ученых даже есть название для чувства тошноты: «жуткая долина».
Теперь, благодаря исследователям из Италии, мы также знаем, что это больше, чем просто чувство.
Команда из Istituto Italiano Di Tecnologia (IIT) в Генуе показала, как взгляд робота может заставить нас думать, что мы социально взаимодействуем, и замедлить нашу способность принимать решения.
«Взгляд — чрезвычайно важный социальный сигнал, который мы используем изо дня в день при взаимодействии с другими людьми», — сказала профессор Агнешка Виковска, ведущий автор исследования, опубликованного в среду в журнале Science Robots.
«Вопрос в том, вызовет ли взгляд робота очень похожие механизмы в человеческом мозгу, как это может вызвать взгляд другого человека.«
Команда попросила 40 добровольцев сыграть в видеоигру« Цыпленок », где каждый игрок должен решить, позволить ли машине двигаться прямо к другой машине или уклоняться, чтобы избежать столкновения, с роботом-гуманоидом, сидящим напротив них.
Голова Ай-Да, гуманоидного робота, способного рисовать людей с помощью своих бионических глаз и рук, видна в офисе робототехнической компании Engineered Arts в Фалмуте, Корнуолл, Великобритания, 7 февраля 2019 г. REUTERS / Matthew Stock / File Photo
Подробнее
Между раундами игрокам приходилось смотреть на робота, который иногда оглядывался назад, а иногда отводил взгляд.
В каждом сценарии ученые собирали данные о поведении и нервной активности с помощью электроэнцефалографии (ЭЭГ), которая обнаруживает электрическую активность в головном мозге.
«Наши результаты показывают, что на самом деле человеческий мозг обрабатывает взгляд робота как социальный сигнал, и этот сигнал влияет на то, как мы принимаем решения, на стратегии, которые мы применяем в игре, а также на наши реакции. «, — сказала Виковска.
«Взаимный взгляд роботов влиял на решения, откладывая их, поэтому люди гораздо медленнее принимали решения в игре.»
Результаты имеют значение для того, где и как гуманоидные роботы будут развернуты в будущем.
» Как только мы поймем, когда роботы вызывают социальную настройку, мы сможем решить, в каком контексте это желательно и полезно для людей и в каком контексте этого не должно происходить «, — сказала Виковска.